Recap: ROS-Industrial Conference at Fraunhofer IPA
/The ROS-Industrial Conference is a great chance for the ROS-Industrial Community to gather, exchange experiences, and discuss future developments. This year's edition was no exception, with 50 participants coming from Europe, Israel, and the US.



During the four sessions, the attendees were given presentations on new developments bridging ROS and other industry-grade software; porting it to real time embedded platforms; and instantiating it within broader development environments. The talks on technology development were complemented by an update on the activities of the ROS-Industrial Consortium Europe and by presentations on non-functional aspects like safety and security as well as the role of open-source licensing. A session on applications of ROS technology in manufacturing scenarios and in new product development concluded the day.




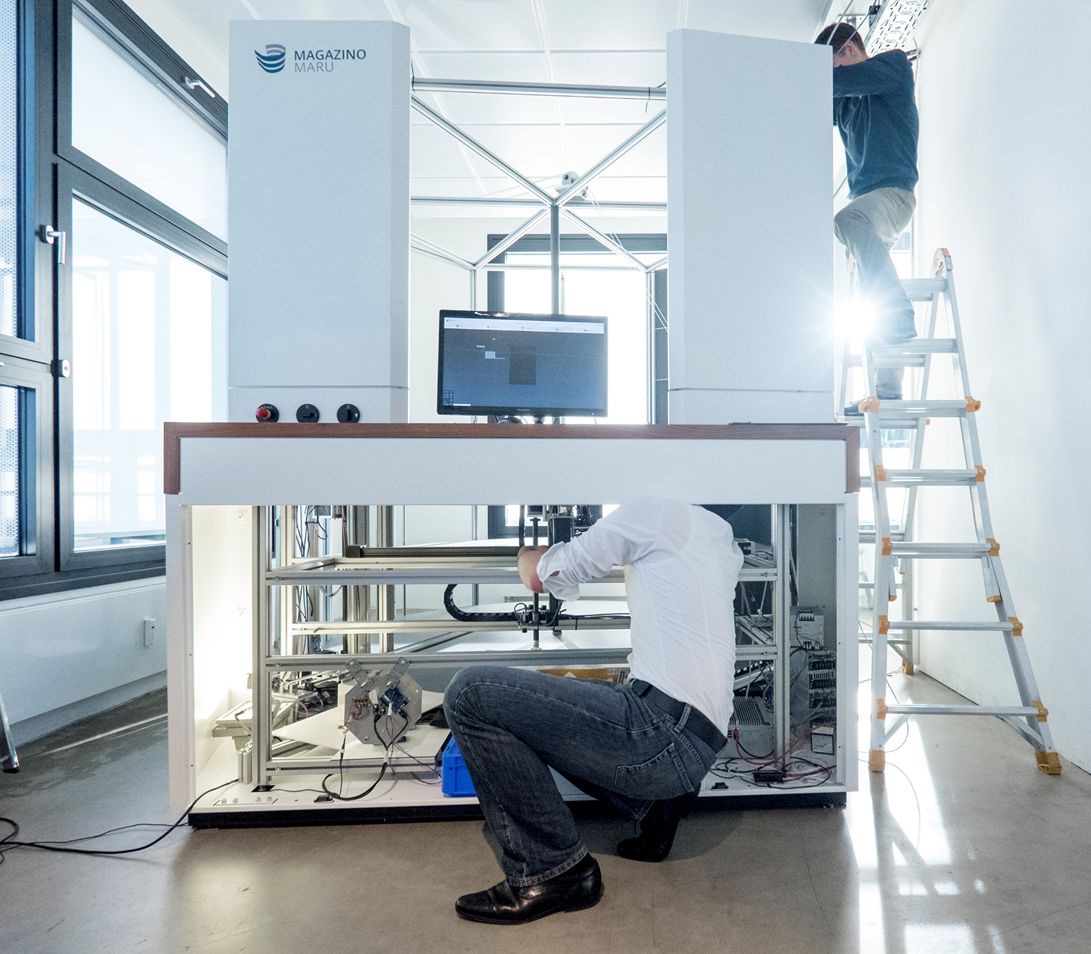
In addition to the usual conference-style presentations, attendees enjoyed a networking lunch and a lab tour at Fraunhofer IPA, with a showcase of its activities in service, industrial, and mobile robotics.
We would like to thank all the participants, and we look forward to next year in Stuttgart for the 4th edition of the ROS-Industrial Conference!