RIC-Americas Meeting Recap (Part 2)
/This post features Part 2 of our March RIC-Americas Meeting Recap. Click here to read Part 1, which is about the demonstration day.
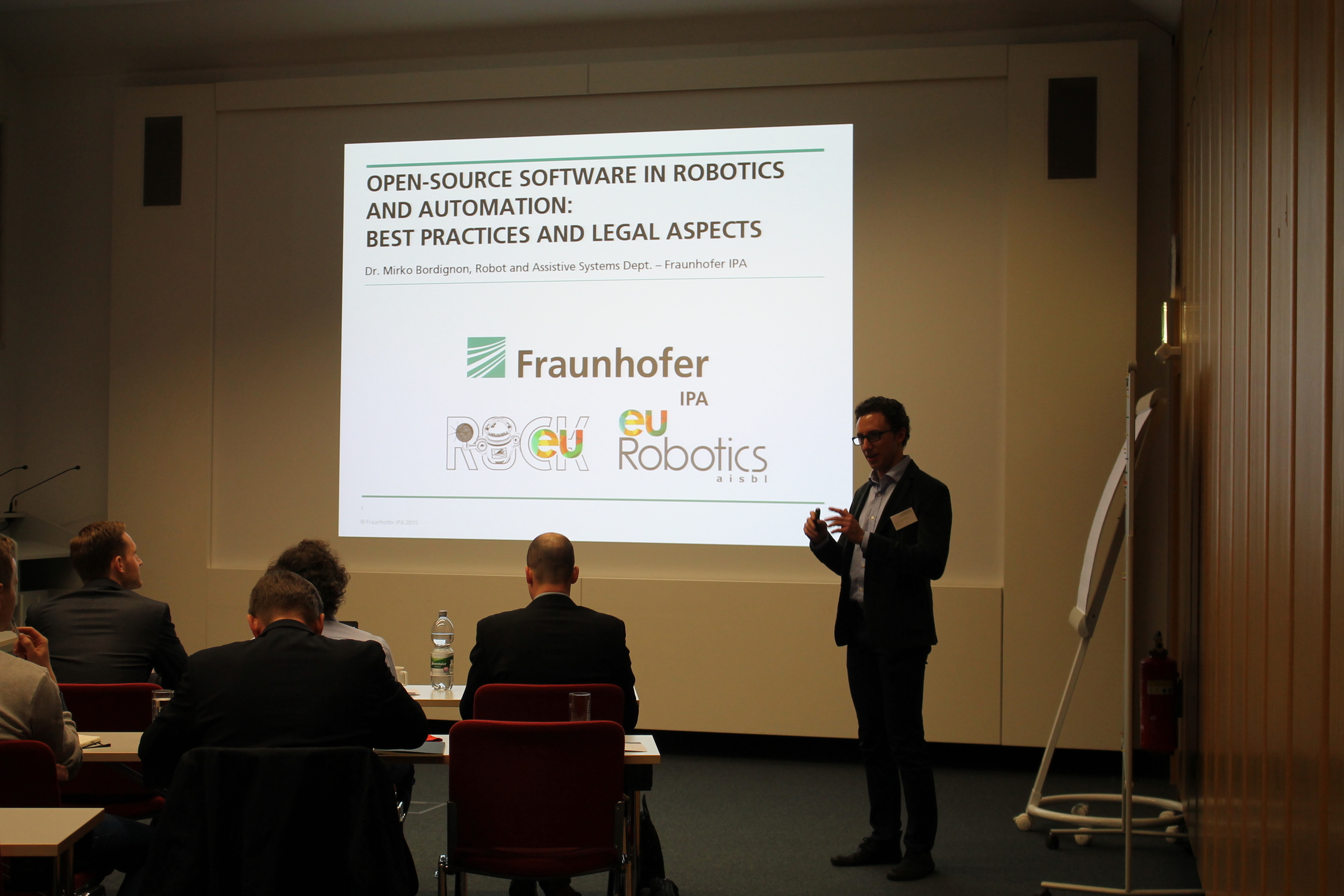
In March, more than 50 attendees from 32 organizations attended the RIC-Americas annual meeting. During the meeting, we learned about progress during the past year, and heard from speakers including Morgan Quigley (OSRF), RIC-EU Program Manager Bordignon (Fraunhofer IPA), Nicholas Yeo Chang Yee (ARTC), and Erik Nieves (fmr. Yaskawa and now PlusOne Robotics).

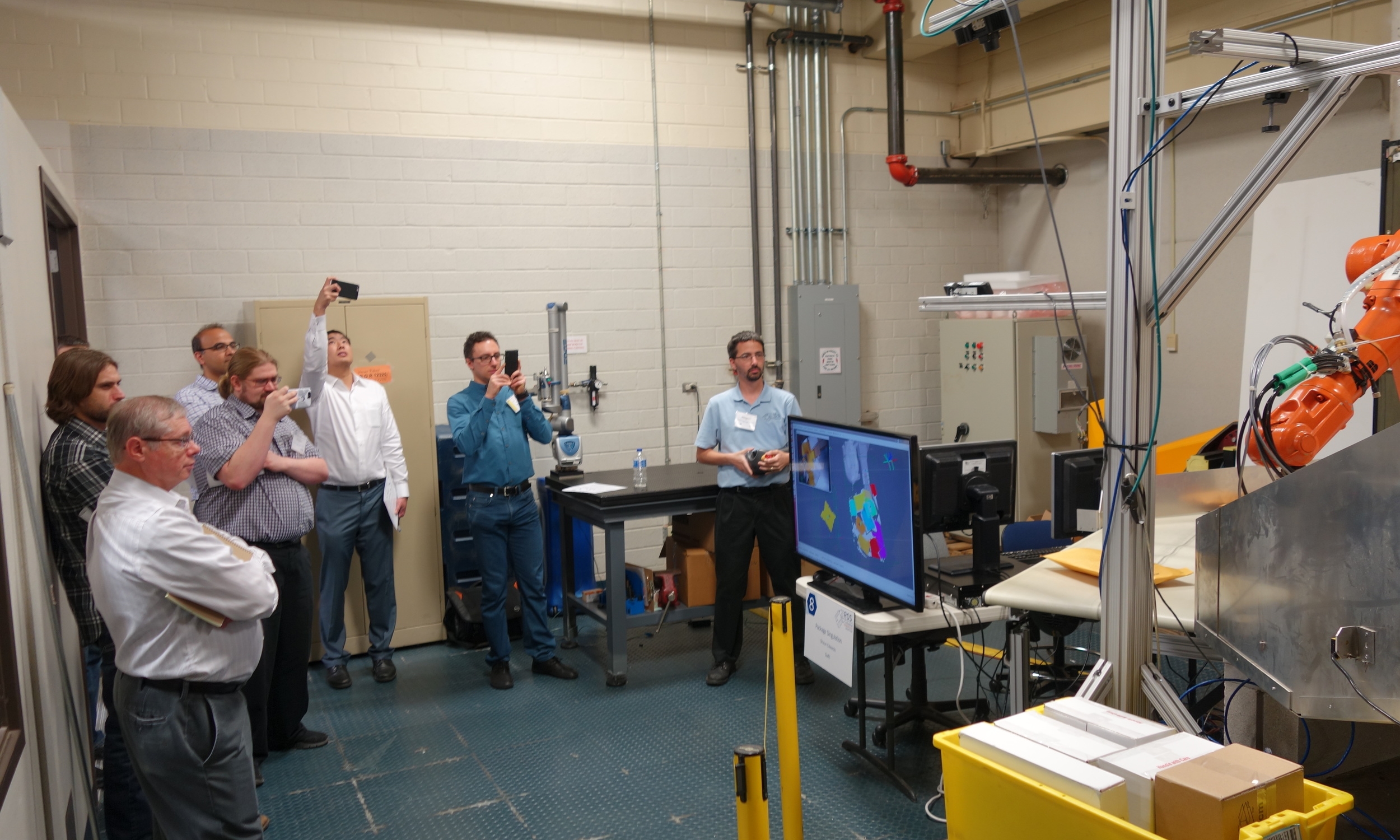
Attendees of the RIC-Americas Meeting.
Quigley provided an update on the progress of ROS 2.0 and presented the latest data on the performance of the real time capabilities, which includes improved performance of micro second level dither, even with some network congestion.
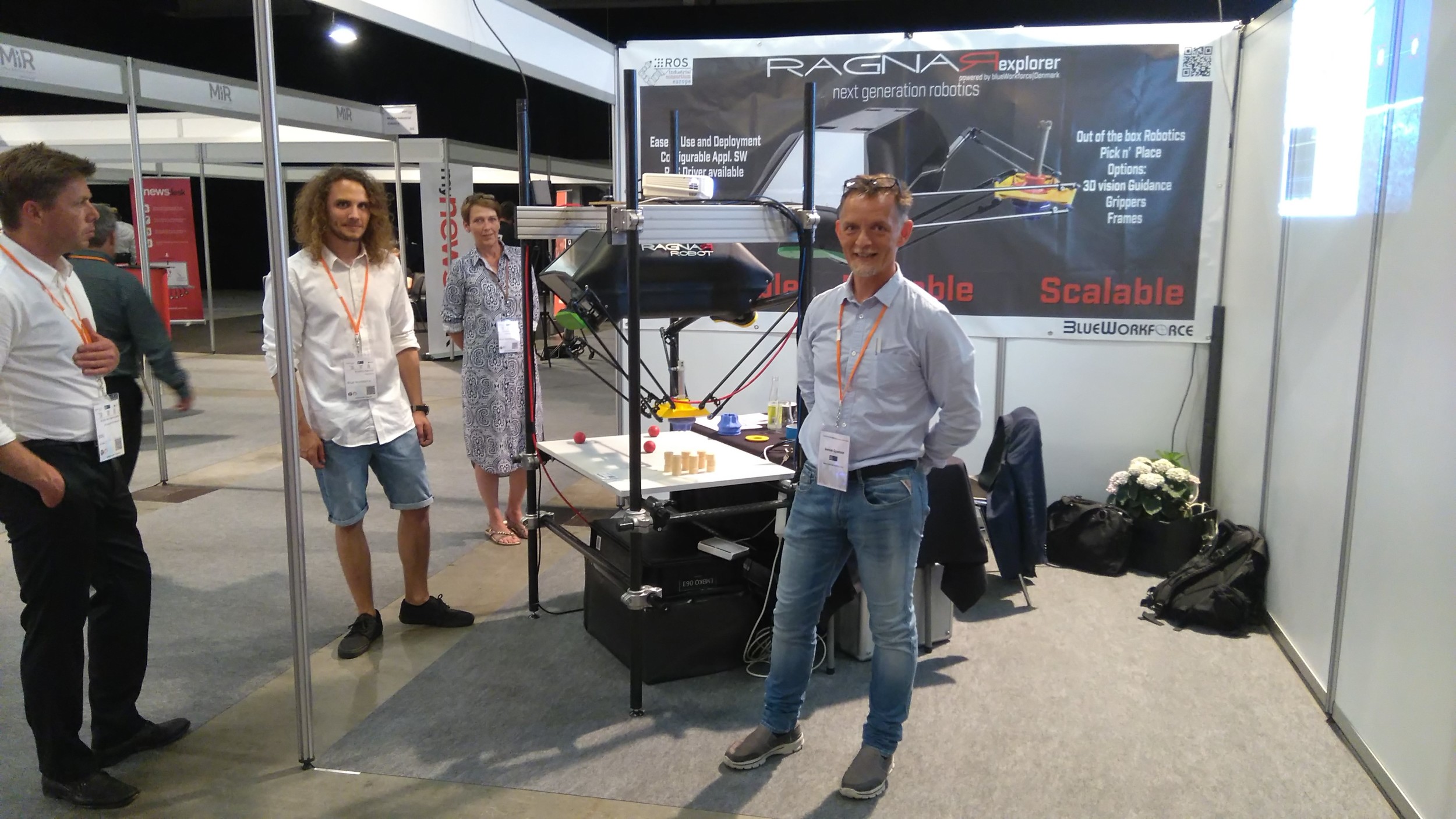
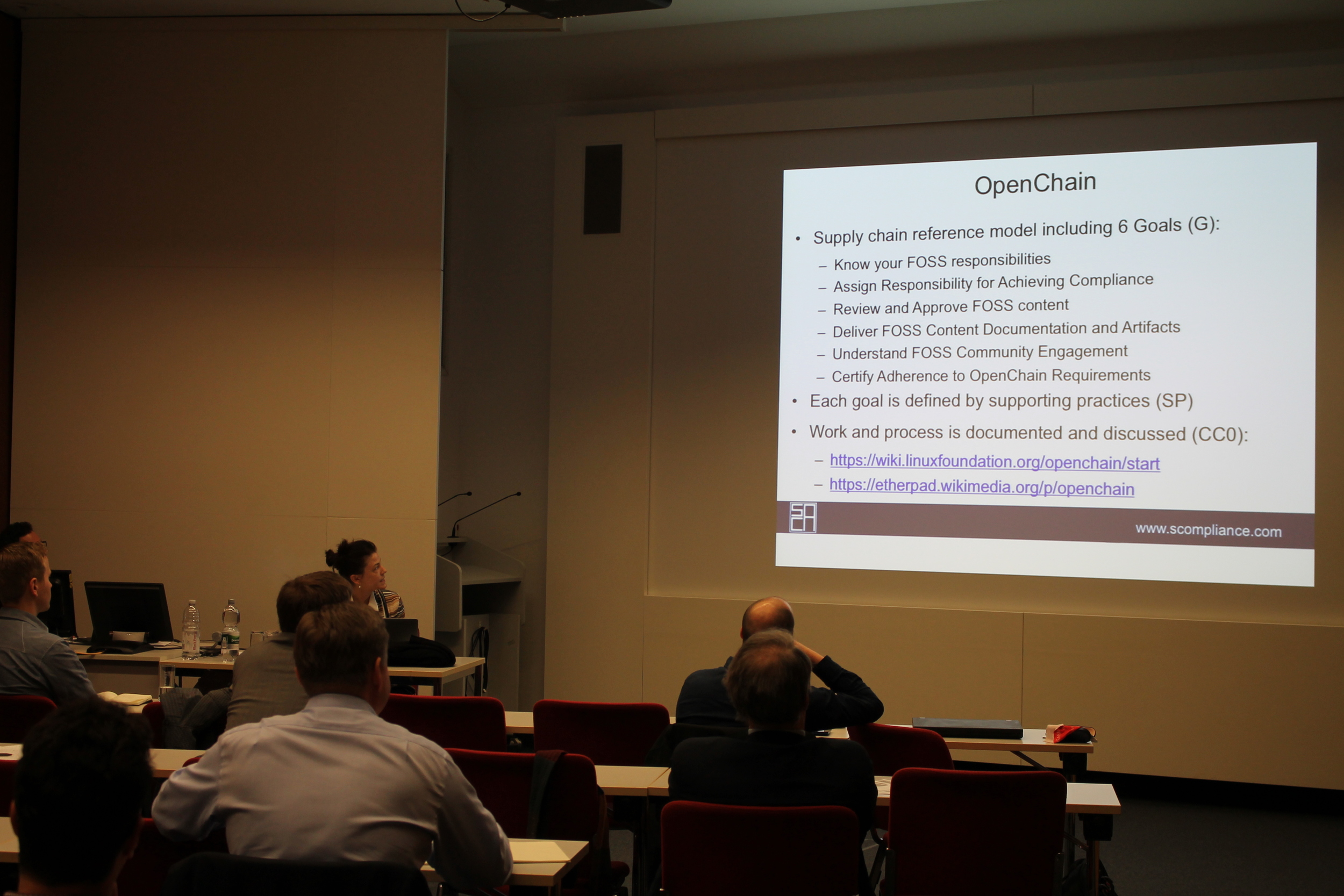
Bordignon inspired the audience with his presentation of the philosophy and progress of ROS software usage for industrial robotics in Europe, including a number of deployed or productized applications.
Yee shared a look into the modern and flourishing R&D capabilities for remanufacturing at ARTC, which is part of A*STAR in Singapore, and presented ARTC’s vision to launch RIC-Asia Pacific.
Nieves kept us guessing with a riveting story of his personal journey to embrace ROS as a representative of a major robot OEM, and then his venture into the world of supervised autonomy with his startup company PlusOne Robotics.
The attendees broke into four groups for roadmapping activities in a round robin fashion on four topics: motion planning, ease of use, hardware interfaces/interoperability, and ROS core. Five upcoming Focused Technical Projects (FTP):
- Robotic Blending Milestone 4: Closing the Loop
- Scan-N-Plan for X: A generalized framework for CAD-free
high mix part processing - CAD-to-ROS Milestone 4: Calibration GUI
- 6 DOF Slicer Milestone 2
- NIST Agile Robotics for Industrial Automation Competition
(ARIAC)
The meeting generated momentum for the coming international expansion. Thanks to our members for your support and collaboration, and a special thanks to the emerging RIC-Asia Pacific for joining us.