

A brief report from the ROS-Industrial Conference 2017
/The ROS-Industrial Conference 2017 was held last week, and once again it grew bigger compared to the previous year’s edition. It expanded to a three-days event, with 28 talks attended by more than 110 participants from both industry and applied research organizations. The talks covered a wide range of topics including technical aspects of open-source robotics, as well as non-technical ones like community dynamics and business viability, application-oriented aspects and future challenges for open-source robotics, like safety and security. Here follows a selection from some of the topics and the side events covered during the conference.



Matt Robinson, Program Manager for the ROS-Industrial Consortium Americas, described how ROS-Industrial has provided large players in manufacturing, who have struggled introducing automation, with an opportunity to introduce agility to manufacturing operations, hence improving utilization of resources and a broader impact on the overall value stream. Martin Hägele, head of department robot and assistive systems at Fraunhofer IPA, gave an overview about ongoing developments in the global robotics market. He addressed both industrial and service robots and presented data which the International Federation of Robotics (IFR) collects and publishes annually in the “World Robotics Report.” Jaime Martin Losa, CEO of eProsima, showed how Micro-ROS bridges the technological gap between the established robotic software platforms on high-performance computational devices and low-level libraries for microcontrollers. The first day ended with guided tours the Robotics Lab, the Application Center Industry 4.0 and the “Milestones of Robotics” exhibition at Fraunhofer IPA.
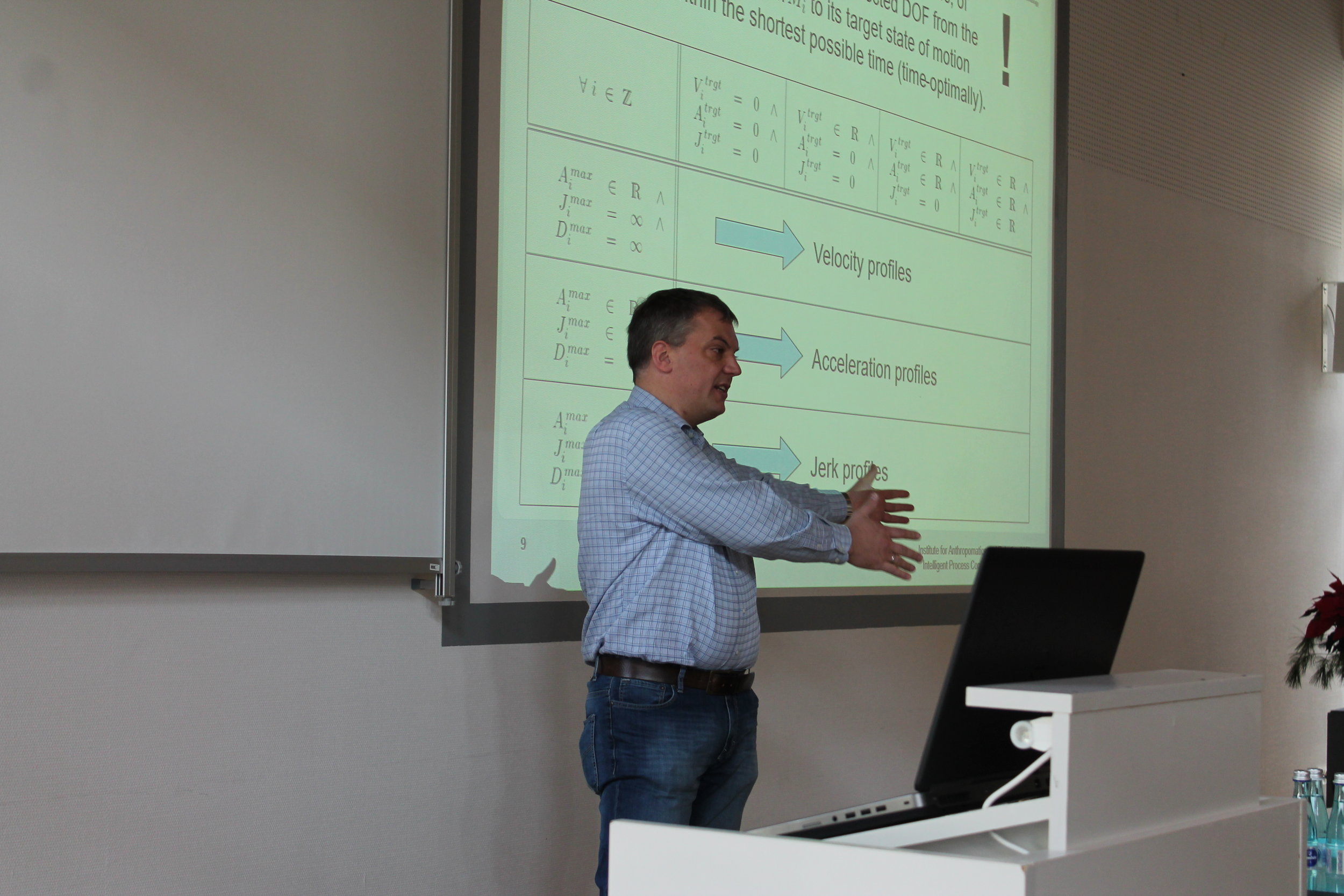

Min Ling Chan reported on how the ROS-Industrial Consortium in Asia Pacific is setting its objective and strategy towards understanding the industry needs in this region. Dirk Thomas from the Open Source Robotics Foundation introduced the forthcoming ROS2 which will provide notable advantages over ROS1, such as support for multiple operating systems and for DDS rather than a custom built middleware. Torsten Kröger, former Head of the Robotics Software Division at Google and now professor at the Karlsruhe Institute of Technology (KIT), showed examples and use-cases of manipulation and human-robot interaction tasks in order to provide a comprehensible insight into deterministic robot motion planning for safety-critical robot applications. As part of the ROSIN project Yvonne Dittrich, professor at University of Copenhagen, investigates how the ROS community takes care of quality and presented her preliminary findings. After some demonstrations of ROS-native hardware and installations the second conference day closed with a stroll through the Stuttgart Christmas market and the social dinner.



Felipe Garcia Lopez, researcher at Fraunhofer IPA, gave insights into the Cloud Navigation he developed for mobile robots in intralogistics applications. Communication via cloud between mobile systems operating in the same traffic area enables efficient interaction without idle times even with dynamic obstacles present. Finally, Kimberly Hambuchen, Principal Technologist for Robotics in NASA’s Space Technology Mission Directorate (STMD), and Martin Azkarate from the European Space Agency (ESA) showed which requirements on software frameworks for space robotics currently exist and presented information on how NASA is using ROS for robotic prototypes for future space exploration missions.
As the event was sold out a week before the event started, we plan on hosting it on a bigger scale next year, while still targeting an early December timeframe. For your reference, the detailed agenda of the whole event as well as all slides from the speakers can be found here.