

World ROS-I Day – What went down and what it means
/The ROS-Industrial global community organized and pulled together the first World ROS-I Day, inspired by the successes of World MoveIt! Day, but focusing on the repositories relevant to ROS-I. We had five sites signed up to host, and we meet up in virtual collaboration rooms as well. The event kicked off from Asia, led by our friends at ARTC in Singapore, ROS-I Asia-Pacific, handing off to the EU, hosted by Fraunhofer IPA, then finally to the Americas, hosted by SwRI’s ROS-I Team located at LiftOff, thanks to PlusOne Robotics, in San Antonio, Texas.
The Asia-Pacific team was joined by a team based in Delhi, India, and the U.S. team was also joined by the Open Robotics team in Mountain View, California. Though these were the meet ups that we were aware of, there were a number of additional teams and individuals that contributed, and the ROS-I developing teams have been happy to see the level of engagement, and hope we can maintain this level of participation moving forward.

ROS-I Asia-Pacific Meet Up

Monitor View of U.S. Location (LiftOff, San Antonio, Texas) and EU Location
(Fraunhofer IPA)

Developers Working on Issues
We were excited to get to work and do some clean up with the ROS-I teams on the various repositories and packages, working on a predefined list of issues. The ROS-I development teams started with a list of repositories as the focus of the inaugural World ROS-I Day on July 11. This enabled for making of a manageable scope and allowed for tracking of progress throughout the day.
The repositories included for the event were:
On the ros-industrial organisation:
ros_industrial_issues
industrial_training
industrial_ci
industrial_moveit
industrial_core
ros_qtc_plugin
robotiq
universal_robot (except driver infrastructure)
ros_canopen
Also over at the ros-industrial-consortium organization:
Descartes
Descartes tutorials
The maintainers worked up reviewing the repositories and classifying the issues and including them in an issue board. This really enabled the organization and workflow for the event. We had designated assigners for issues and leveraged an IRC chat room to do assignment of issues and enable efficient communication for remote teams. Within the rooms we had to be careful managing that we did not do redundant work. Though a few times issues were worked by multiple developers, for the most part, the event went off well considering the logistical challenges that can be encountered when working across multiple time zones around the world.
Over the 22 hours that World ROS-I Day was in-flight, 31 issues were closed and there are, at this time, 16 Pull Requests to be reviewed, with a handful of assigned issues still being worked, per the issue board.
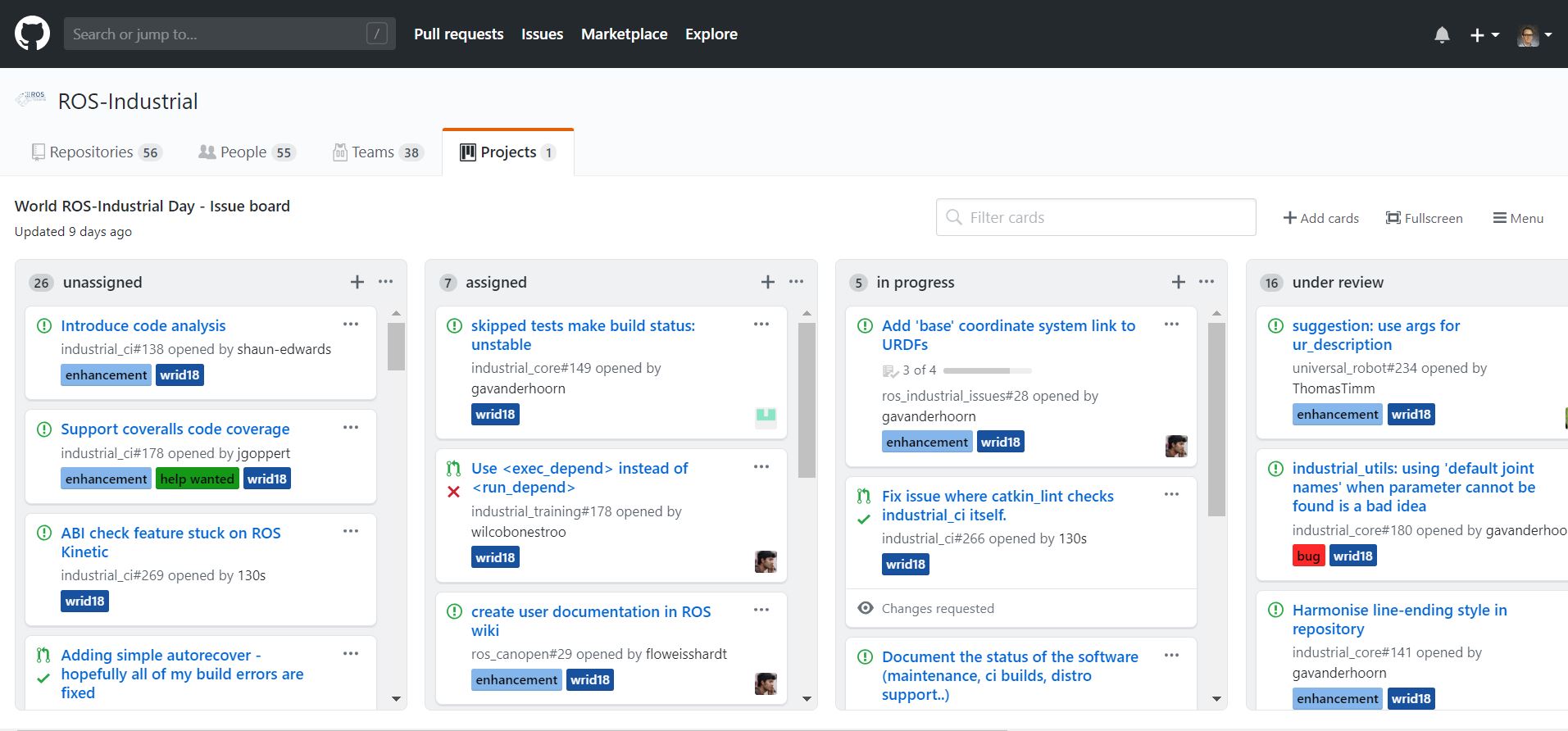
WRID18 Issue Board
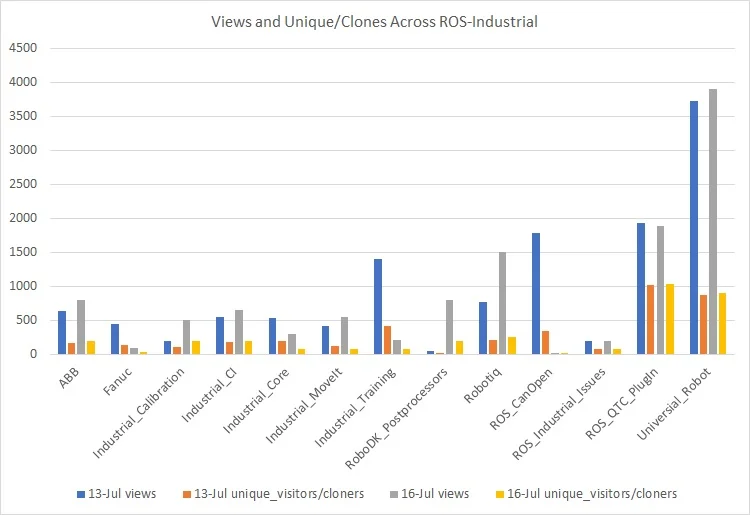
Overall, the ROS-I team, and we hope all those that leverage ROS-Industrial repositories, feel this was a worthwhile and a quite successful event. Traffic statistics indicate that the repositories of interest saw sustained activity even after World ROS-I Day.

Moving forward, we are working to continue the momentum. This will manifest itself in an effort to improve the monthly ROS-I Developers’ Meeting, which we have been working to socialize via the ROS-I Discourse Category at https://discourse.ros.org/t/ros-i-developers-meeting/5047/18. Furthermore, we are excited to continue our support of World MoveIt! Day this October. And, of course, we are excited to begin the planning for a follow World ROS-I Day, and are looking forward to getting the feedback from the developing community for how to make this event more meaningful and engaging.
It is an exciting time in open-source software as an interest is advancing in industrial and manufacturing automation capability. We look forward to continue engaging the development community and to provide avenues for collaboration. ROS-I set out to be an open-source project to bring the power of ROS to industrial applications. Along the way, it has at times, been difficult to bring the developing community to these same applications. We hope through engagement and meaningful collaboration events, we can build that community, and we hope you look forward to laying those foundational pieces with us.
Keep an eye out for updates on planning/details for World MoveIt! Day, and of course the second annual World ROS-I Day, potentially in the first quarter of 2019, but of course, we are open to timing recommendations. Thanks for your continued interest in open-source for industrial automation!