

Robotic Blending Milestone 5 Wraps Up on the Foundry Shop Floor
/On March 7, 2024, the Robotic Blending Milestone 5 team convened in West Jefferson, Ohio, at Fisher Cast Steel to see a demonstration of a Scan-N-Plan framework, optimized for a foundry system, that has an operational goal of grinding riser and gate surface anomalies to finished surface tolerances. The idea is to provide a system that is operator-driven and requires no interaction with the traditional robotic teach pendant. Through the use of intuitive user interfaces, the system should be able to work from simple operator cues to process parts to their desired finish state.

Workflow including Isu developed capability
Launched in March 2023, the program was built around a team that included sponsor Steel Founders’ Society of America (SFSA), Iowa State University (ISU), Yaskawa Motoman, PushCorp and Southwest Research Institute (SwRI). The program would leverage legacy ROS-Industrial Scan-N-Plan developments over the course of prior Focused Technical Projects (FTP) developed via the ROS-Industrial Consortium, as well as university developed capabilities at ISU, funded previously by SFSA. The combined capability may be seen in the below graphic.
The program held workshops and integration events at multiple team member sites. The first was a process development workshop hosted by PushCorp in their process development lab in Garland, Texas. Fisher Cast Steel provided samples for each team to utilize for testing and PushCorp provided guidance on how best to set up their spindle and active compliance device.
From there a starting system, with minimal Scan-N-Plan framework was instantiated in the lab at SwRI. This was largely based on the Scan-N-Plan Workshop which has been the basis for some of the recent trainings relative to industrial reconstruction and motion planning pipeline tuning.

Process development at pushcorp
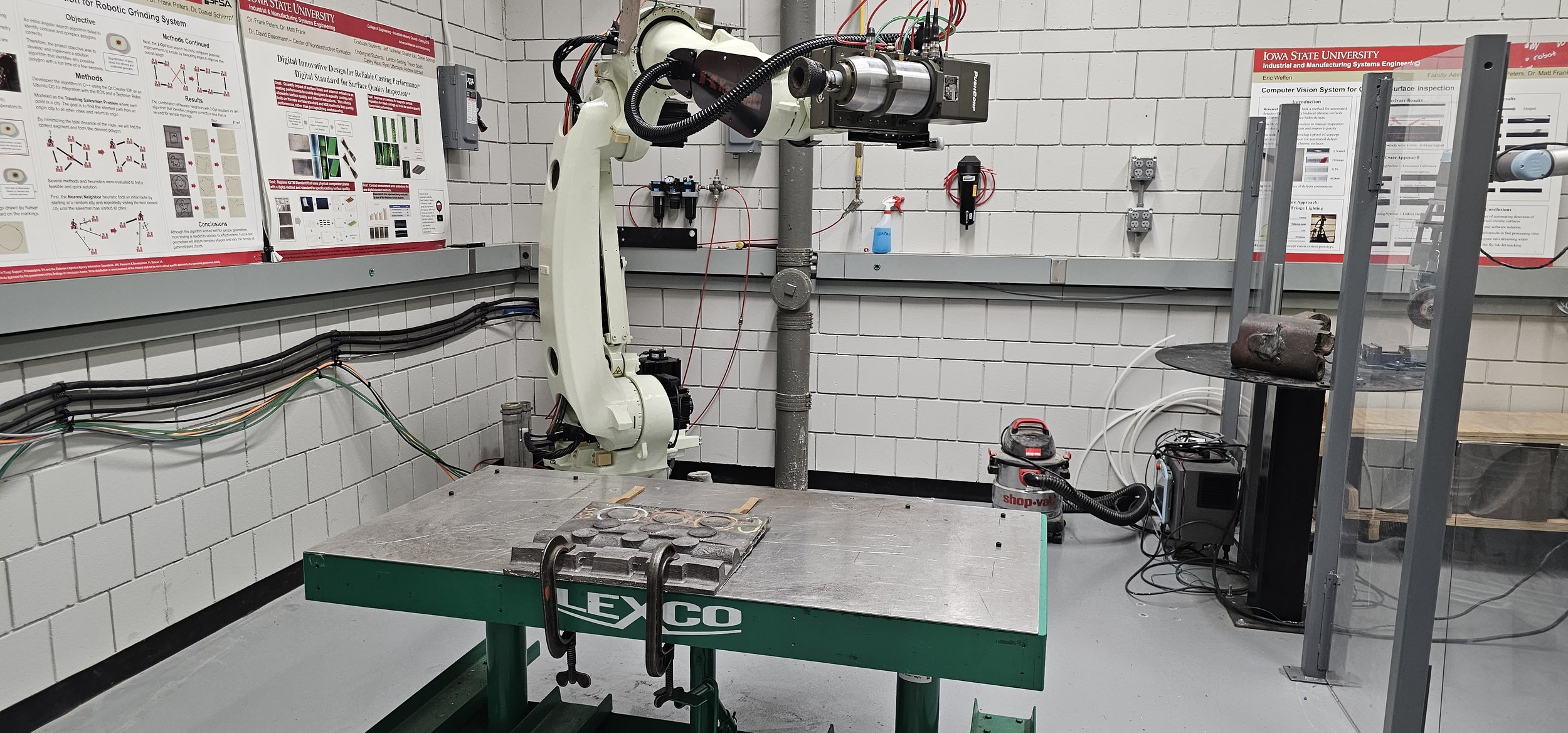
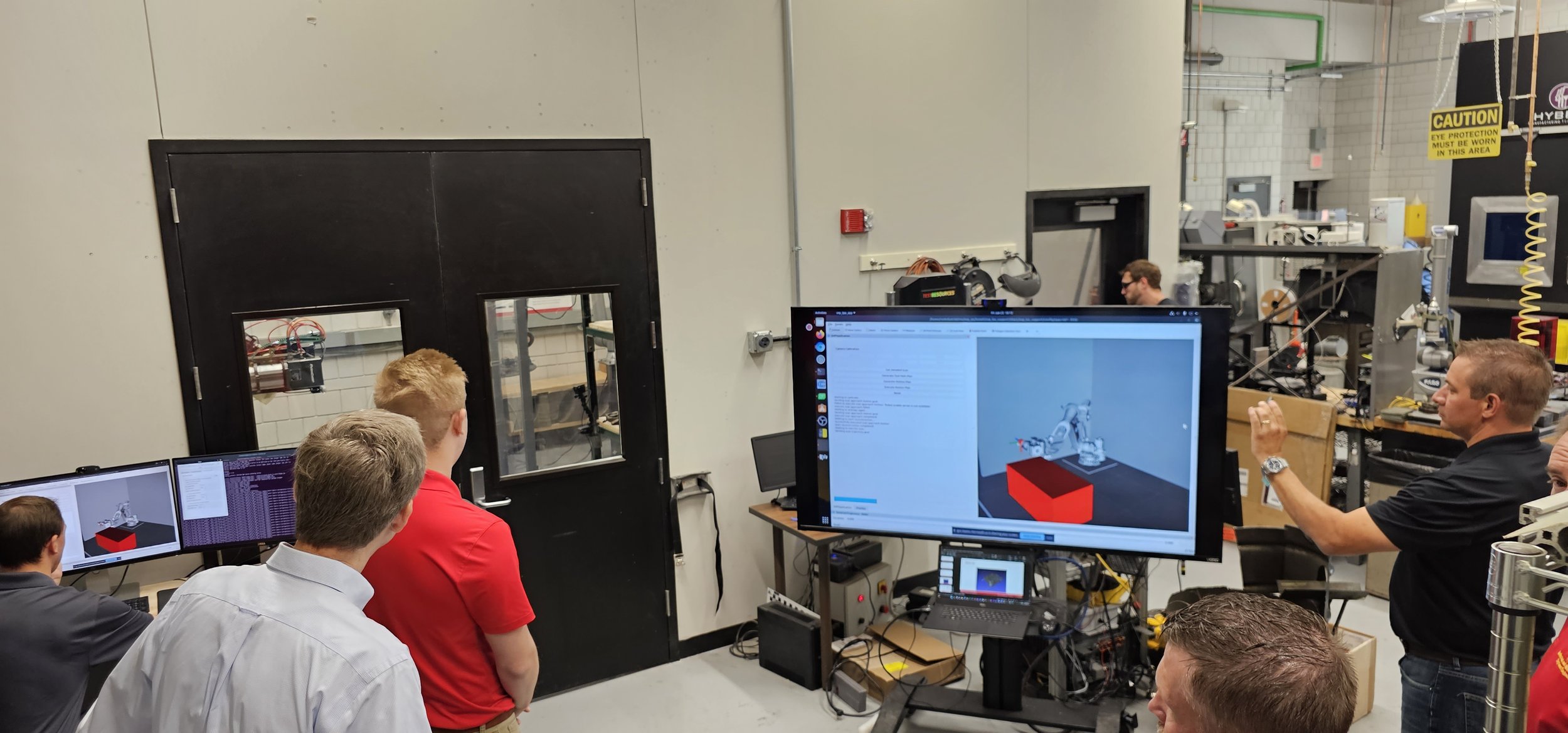
From this point after a virtual demonstration in the SwRI lab, work got going in the Iowa State lab. ISU had installed a robust Kawasaki industrial robot with a similar but different PushCorp active compliance/spindle combination. One of the goals of this program was to create the same software implementations at each site on their specific configurations. This would enable ISU to develop add-on capabilities and test them in their lab and then update the main application to enable incorporation into the end user foundry site for evaluation and use. The software framework for the program and the modules to be updated and contributed by ISU are pictured below.
ISU hosted an integration event and the team worked together to assist ISU in updating their prior work from ROS Kinetic to ROS 2 Humble. Also, there were numerous working sessions to get a reliable ROS 2 driver and on robot interface for the PushCorp hardware working on their system. By the time the demonstration came around at ISU they had a working Scan-N-Plan system and had gotten tool path planning, and new concepts for approaches for grinding stone media working. This would end up being the prime path moving forward relative to the target castings for the program.


Though we did not get all the ISU capability incorporated, the team continued to work on the ISU segmentation approach and the program at ISU continues to work and test a more recent version. The participation of the students highlighted the opportunity for collaboration of grad school programs with more seasoned programmers to establish the foundational tools needed to enable students to come up to speed on complex ROS-based systems and how to sustain the talent pipeline.
Finally, the Yaskawa Motoman team completed their build and integration activities. The team came together quickly at Fisher Cast Steel to get the system ready for ROS-based capability deployment. Safety issues were resolved and cable management and PushCorp equipment integration was further optimized. Once the system was ready, the SwRI team deployed to the industrial PC via developed Docker images the full application, executed camera calibration and started initial testing.
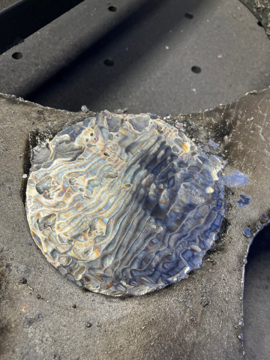
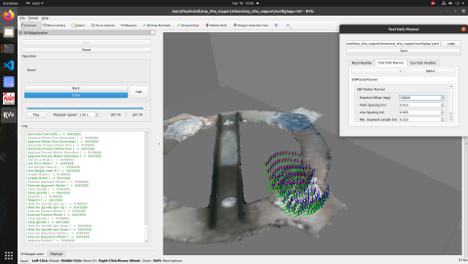
By the mid-point of the second week the system was regularly grinding castings. It became evident that process optimization and development would be required. Due to the human-drawn boundary segmentation not being ready, the user selects a region of interest to do the grinding on the UI by simply circling it on the reconstruction in the view. The industrial reconstruction provides nice contrast and human markings show up clearly to assist in the process.
The full team convened for the demonstration on March 7, 2024. A number of features were processed, and the system demonstrated, even with region selection from the GUI to efficiently process only within the region of interest. There have been several areas for improvement identified, but the team felt a lot was learned and the system can deliver value. Fisher Cast Steel has since done a number of process enhancements and continues to improve system performance while also training operators to run the system independently. A number of enhancements to the open source Scan-N-Plan_workshop have been pushed and a blog post details those improvements in detail. A highlight video of the program is slated for later release.





Thanks to the full team for their work on realizing this capability at Fisher Cast Steel. This program highlights the value of bringing university partners together with robotic system deployers and solution providers along with sound software practices to realize compelling capability and provide pathways for funded university research to get more efficiently into operational environments. Thanks to the program sponsor Steel Founders’ Society of America for being the champion for this program and thanks to Fisher Cast Steel for their continued enthusiasm and feedback to continue to improve the delivered system which will further benefit others down the road.
Disclaimer: The publication of this material does not constitute approval by the government of the findings or conclusion herein. Wide distribution or announcement of this material shall not be made without specific approval by the sponsoring government activity.
Acknowledgement: This research is sponsored by the DLA-Troop Support, Philadelphia, PA and the Defense Logistics Agency Information Operations, J68, Research & Development, Ft. Belvoir, VA.