

Scan-N-Plan with the ORBBEC Femto-Mega
/During the annual ROS-I Consortium Americas meeting in March, ORBBEC provided for evaluation to Southwest Research Institute (SwRI) a Femto Mega, a depth+RGBD camera. Since then, the ROS-I team has tested the performance of the Femto Mega within the standing Scan-N-Plan demo and qualitatively compared it to the previously used camera, an Intel RealSense D455.
SwRI’s Scan-N-Plan demo utilizes RGB-D depth sensor to generate colored point clouds. The point clouds are utilized by Industrial Reconstruction to generate a colored mesh of the object in the environment. In the Scan-N-Plan demo, the scanned object is the underside of a white paint wok.
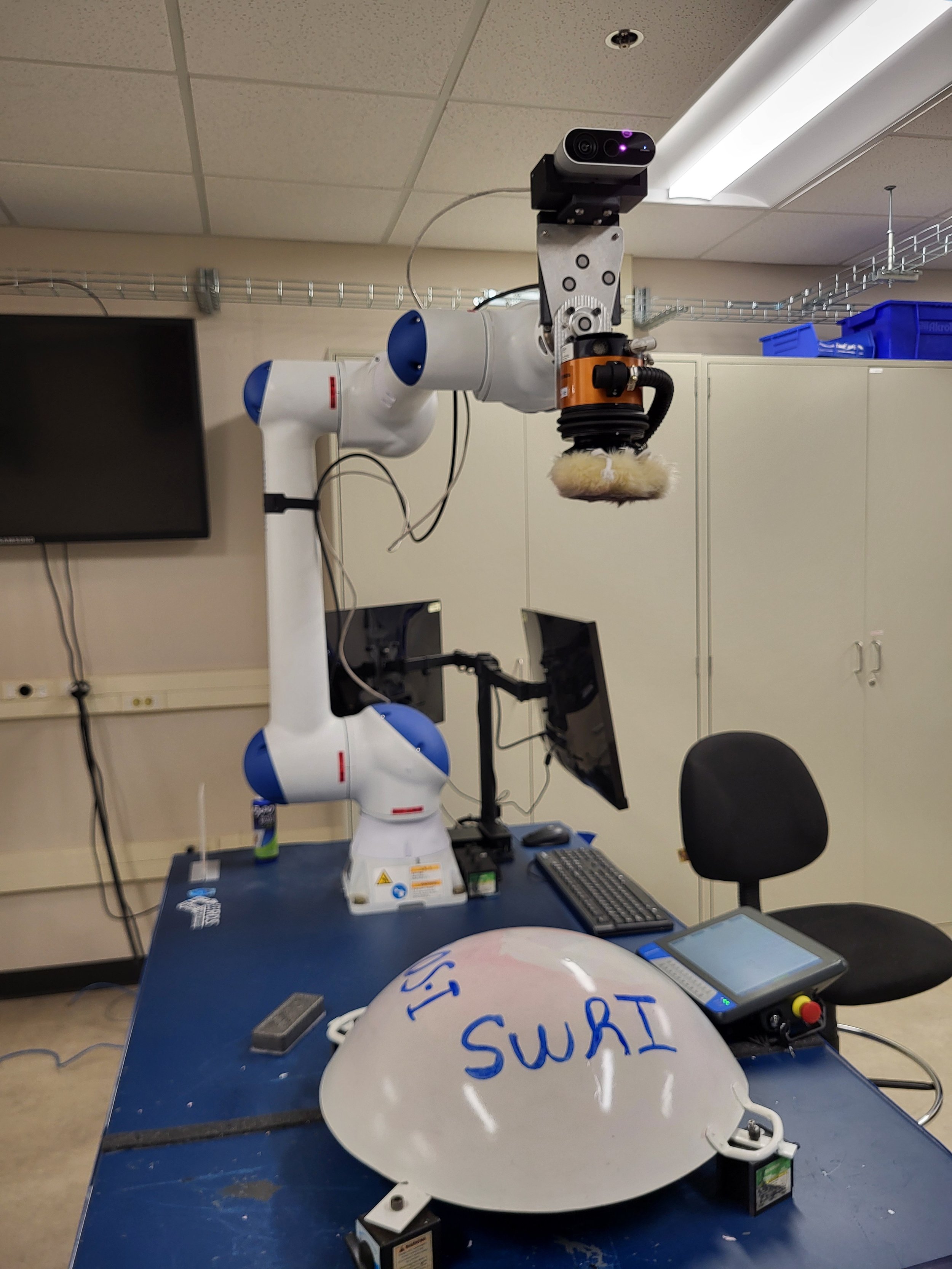
Scan-N-Plan demo with ORBBEC Femto Mega mounted on a Yaskawa HC10
Setup
Setting up the Femto Mega was relatively easy. There is github page for ORBBEC ROS2 drivers and documentation on how to install and use the driver, as well as download the OrbbecViewer. The datasheet was helpful for determining valid combinations of frame rate and resolution that the Femto Mega could be configured with the driver. The Femto Mega’s power over ethernet feature made long cable runs convenient and the publishing rate for the sensor data was very stable thanks to the onboard computing.
Qualitative Comparison
After calibrating each camera, we ran a scan using the D455 and then the Femto Mega. The Femto Mega had much less noise in the depth data and produced crisper edges. The Femto Mega also handled glare much better than the D455. In the reconstructed mesh, the Femto Mega had better surface quality than the D455. However, the D455 did result in a reconstructed mesh that had less blurring of the color data, particularly when looking at the written blue text. This is likely an artifact of how Industrial Reconstruction averages color data when reconstructing the mesh and may be further optimized in configuration settings.

fEMTO mEGA cOLOR iMAGE

fEMTO mega dEPTH fRAME

femto mega RECONSTRUCTED MESH

Colored Point cloud from femto mega

rEALSENSE d455 cOLOR iMAGE

rEALSENSE d455 dEPTH iMAGE

rEALSENSE D455 RECONSTRUCTED MESH

colored point cloud from realsense d455
We’d like to thank ORBBEC for giving us the opportunity to evaluate the Femto Mega and look forward to seeing more ORBBEC solutions utilized in industrial solutions.