ROS 2 in Industry: Key Takeaways from the ROS-Industrial Conference 2025
/The 13th ROS-Industrial Europe Conference 2025 took place on 17–18 November 2025 in Strasbourg, co-located with ROSCon FR&DE. The event brought together industrial practitioners, researchers, and technology providers to share practical experience with deploying ROS 2 in production environments, discussing both proven approaches and remaining challenges.
Hosted at the CCI Campus Alsace – Site de Strasbourg, the program covered robotics market insights, vendor perspectives, and technical topics such as driver development and real-time control. Further sessions addressed humanoid safety, modular application frameworks, and industrial expectations regarding determinism and long-term maintainability. Updates from the different regional ROS-Industrial consortia provided a broader international perspective.
The event concluded with a hands-on company visit to ENGLAB, allowing participants to see robotics solutions in action beyond the conference hall.
Event Page with links to the slides and presentations video here
Day 1 Highlights : From Market Momentum to “ROS 2 Going Industrial”
Werner Kraus opened the conference with an introduction to Fraunhofer IPA and a global robotics market overview. He highlighted strong growth trends, particularly in medical and humanoid robotics, and emphasized that safety in humanoid systems remains a critical research and engineering frontier.
Felix Exner from Universal Robots presented ongoing development of ROS interfaces for robot controllers, including motion-primitive-based approaches. He addressed a recurring industry challenge: maintaining a stable ROS ecosystem across multiple distributions while balancing documentation quality, development agility, and long-term support strategies.
Robert Wilbrandt from the FZI Research Center for Information Technology shared insights into RSI integration, asynchronous control strategies, and the practical integration challenges that arise when transitioning research prototypes into industrial systems. His talk also highlighted key software-architecture considerations such as driver lifecycles, memory management, and allocation tracking—turning “robustness” into measurable engineering practices.
Alexander Mühlens from igus GmbH showcased several ROS-powered innovations and real-world deployments, with particular focus on the RBTX marketplace and the value of ecosystems in reducing cost, risk, and complexity for robotics adoption. His examples demonstrated how accessible, composable solutions can accelerate industrial uptake.
Adolfo Suarez Roos from IRT Jules Verne discussed Yaskawa drivers and industrial applications ranging from medical finishing processes to offshore welding automation. A key message was that successful deployments depend on tight integration decisions—including controller capabilities, communication frequency, and compatibility constraints—tailored to the realities of the shop floor.
Lukasz Pietrasik from Intrinsic presented a practical approach to integrating ROS with broader AI and software platforms. Topics included developer workflows, digital-twin environments, behavior-tree-based task composition, and bridging ROS data and services into higher-level orchestration platforms.
Afternoon Focus : Safety, Resilience, and Industrial Expectations
Florian Weißhardt from Synapticon GmbH addressed the unique safety challenges of humanoid robots, where unpredictability, balance loss, and autonomy make traditional “safe state” concepts insufficient. His session reinforced a central theme of the day: as robots move into unstructured environments, safety becomes a system-level design challenge rather than a single-component feature.
Florian Gramß from Siemens AG explored the tension between traditional deterministic automation and the flexibility offered by ROS-based systems. He advocated for hybrid architectures—deterministic where required, flexible where possible—as a realistic path forward for modern industrial automation.
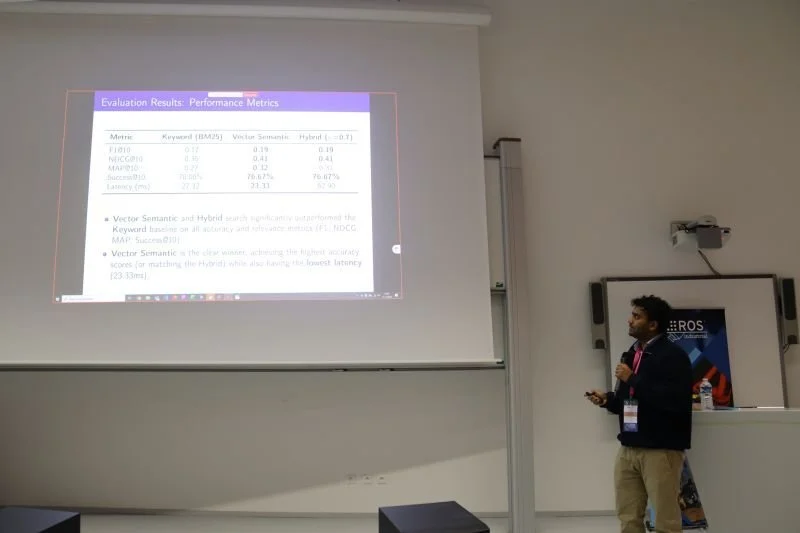
Riddhesh Pradeep More presented his work on semantic discovery and rich descriptive models for reusable ROS software components, demonstrating how knowledge graphs and vector-based semantic search can significantly improve the identification, understanding, and reuse of ROS packages across domains such as navigation, perception, SLAM, and manipulation.
Dennis Borger showcased applied ROS 2 research projects including robotic bin-picking and automated post-processing, highlighting how modular architectures, hybrid vision approaches, and AI-supported workflows enable flexible automation solutions for small-batch and customized industrial production scenarios.
Denis Stogl and Nikola Banović from b-robotized GmbH shared practical experiences in bringing ROS 2 into real industrial environments, emphasizing the role of ros2_control, hardware abstraction, diagnostics, and seamless integration with industrial communication protocols such as EtherCAT, CANOpen, and Modbus to achieve production-ready robotic systems.
The first day concluded with a Gala Dinner, where informal discussions and networking often proved as valuable as the scheduled presentations.
Day 2 Highlights : Consortium Alignment and Advanced Applications
Consortium Updates Across Regions
The second day began with updates from across the global ROS-Industrial network:
• Vishnuprasad Prachandabhanu and Yasmine Makkaoui on ROS-Industrial Europe initiatives
• Maria Vergo and Glenn Tan on Asia-Pacific ecosystem orchestration, sandboxes, and large-scale deployments
• Paul Evans from the Southwest Research Institute on ROS-Industrial Americas roadmap priorities, technical progress, and improvements in usability and tooling
Louis-Romain Joly from SNCF introduced nav4rail, a navigation stack tailored specifically for railway maintenance robots. His key insight was that in constrained domains—such as effectively one-dimensional rail movement—simpler, model-driven solutions can outperform general-purpose navigation frameworks in both clarity and engineering efficiency.
Mario Prats from PickNik Robotics closed the conference with advancements in mobile manipulation workflows and the continued evolution of MoveIt toward professional-grade tooling, highlighting behaviour-tree composition, real-time control capabilities, and an AI-oriented roadmap.
Closing Takeaway : Industrial ROS Maturing Through Engineering Reality
The conference confirmed that ROS 2 is steadily gaining ground in real industrial environments. A wide range of practical use cases, improved interoperability through ros2_control and fieldbus integration, and increasing adoption of behavior-tree-based architectures demonstrate clear technical progress.
At the same time, challenges remain, particularly in documentation quality and real-time performance. Safety, AI integration, and driver development continue to shape the technical agenda, while expectations for new collaborative initiatives such as a potential ROSin 2.0 underline the need for sustained ecosystem support.