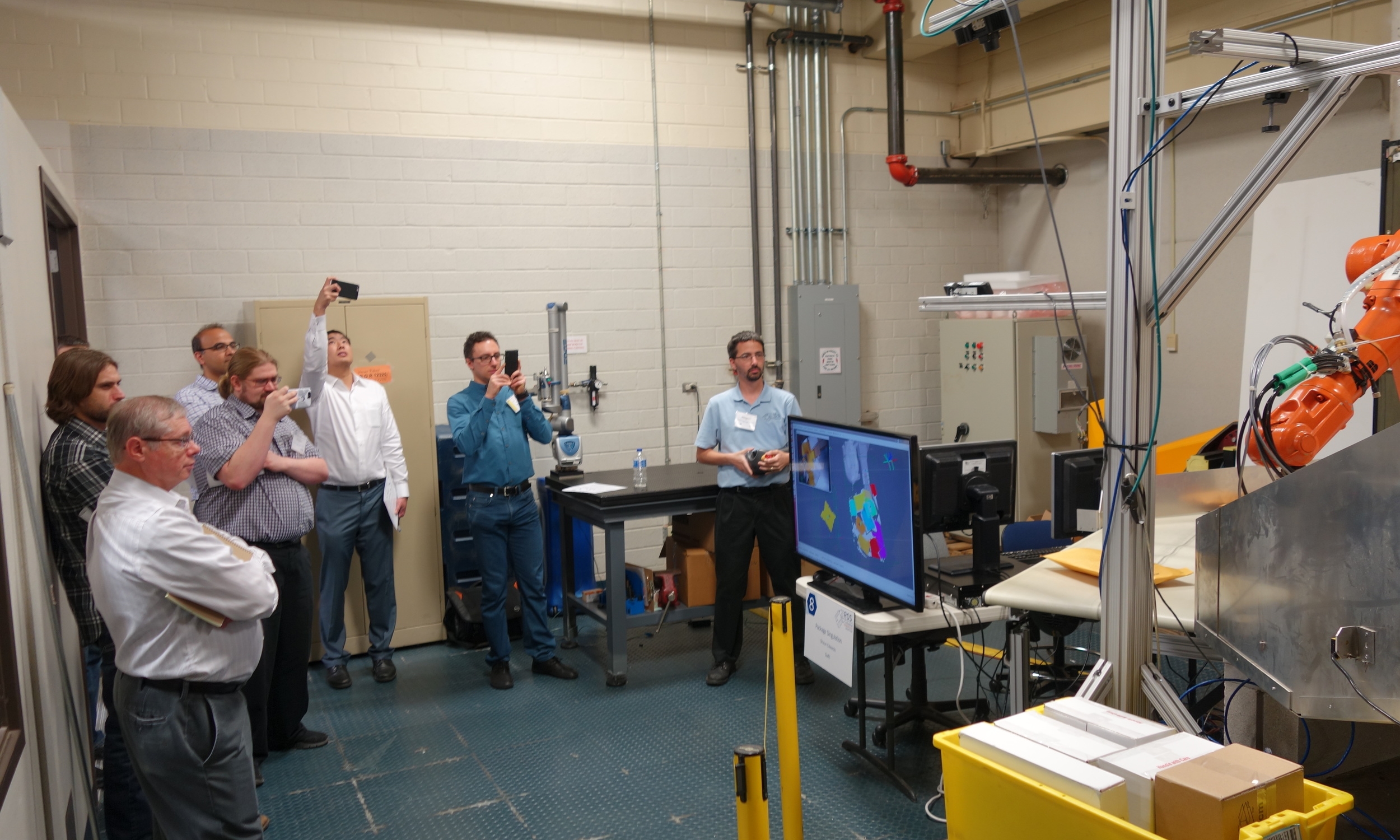
Robotic Product Singulation Testbed
/We are excited to post our 50th ROS-I video: Robotic Product Singulation Testbed. This project was demonstrated during the Annual Meeting and is a collaborative development between ABB and SwRI to create a commercial product for warehouse automation. It highlights that, with some optimization, ROS-I applications can exhibit fast cycle times, without sacrificing the intelligence afforded by ROS. A scale demonstration of this technology will be on display next week at MODEX 2016, booth MA 957 (Baldor/ABB).