

CloPeMa Project Leverages ROS-Industrial
/
CloPeMa, Clothes Perception and Manipulation, is a European project to research the manipulation of clothing and other textiles with industrial robots. The ultimate vision of the program is to autonomously fold “any" kind of clothing. The grasping and manipulation of flexible objects is a non-trivial problem. This makes the CloPeMa very exciting. The research will definitely push the state of the art in robotic grasping and manipulation.
Five partners are working together on this program:
- Czech Technical University (CVUT), Czech, Republic is performing industrial robot integration and depth data analysis
- University of Glasgow (UG), United Kingdom is developing the 3D vision hardware.
- Centre for Research and Technology Hellas (CERTH), Greece is performing project management and developing intelligent planning of actions software.
- Neovision s.r.o. (NEO), NEO, Czech Republic) is performing system integration.
- University of Genova (UNIGE), Italy developing a state of the artl gripper with tactile and optic sensing.
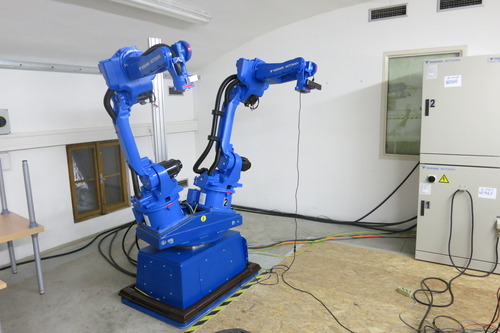
CTU is utilizing ROS-Industrial to control two Motoman, MA1400 industrial robots. They are expanding the capability in the Motoman stack to enable multi-robot control. New capabilities will include the ability two move multiple manipulators at the same time. The software developed under the CloPeMa project will be released open source.
Further information can be found at the following sites: