

Announcing Industrial Reconstruction Leveraging Open3D
/
Open3D Industrial Reconstruction of an aerospace radome
Mesh reconstruction is often a critical step in an industrial robotics application. CAD models are not always readily available for all parts and often parts have warped or changed due to frequent use in the field. Reconstruction allows a robotic system to get mesh information in these scenarios. Once a mesh has been generated software can be used to generate toolpaths for the robot either autonomously or with human input. These toolpaths can then be converted into robot trajectories which are subsequently executed.
Many sensors and software packages exist that allow for generating pointclouds or meshes, and it seems that RGB-D cameras are becoming increasingly popular and readily available. Previously, ROS-I released yak, which enabled using these cameras mounted on a robot arm to created a mesh. However, yak required CUDA, which can be difficult setting up, and yak would frequently have accuracy issues at the boundaries of meshes. Our new Industrial Reconstruction package still uses these same RGB-D cameras, but makes integrating mesh reconstruction into your industrial robotics application to be easier than it ever has been before by using the 3D data processing library Open3D.
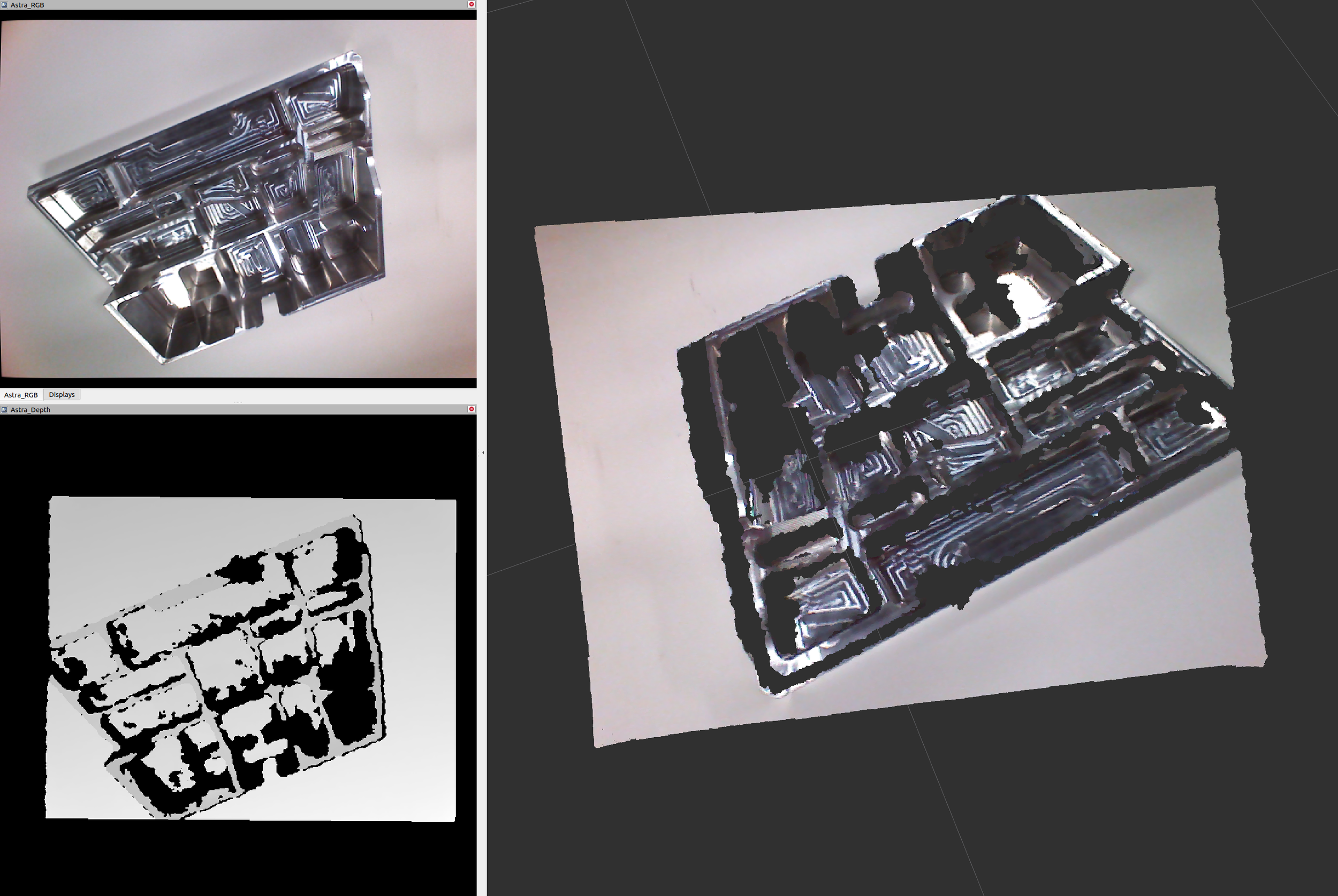
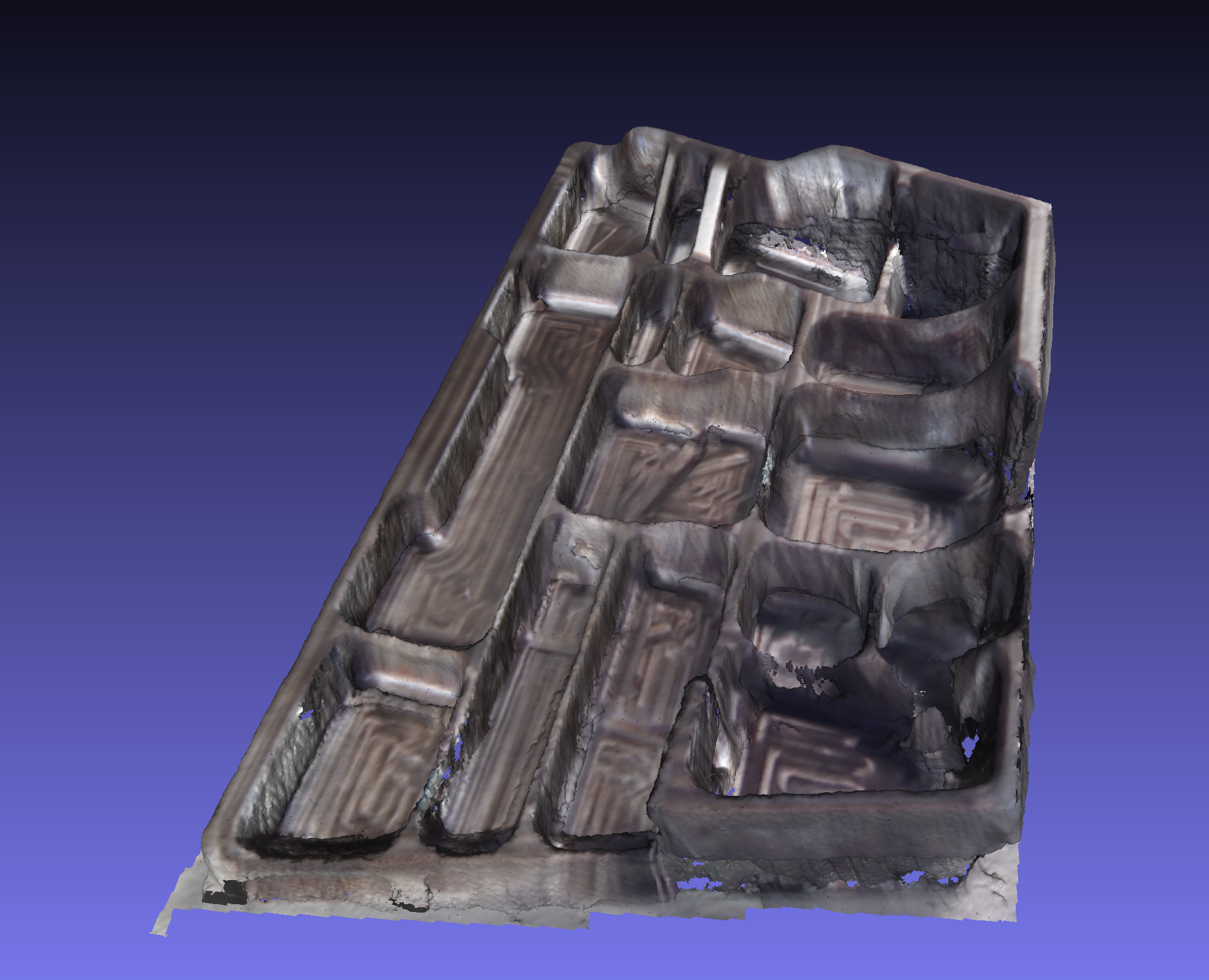
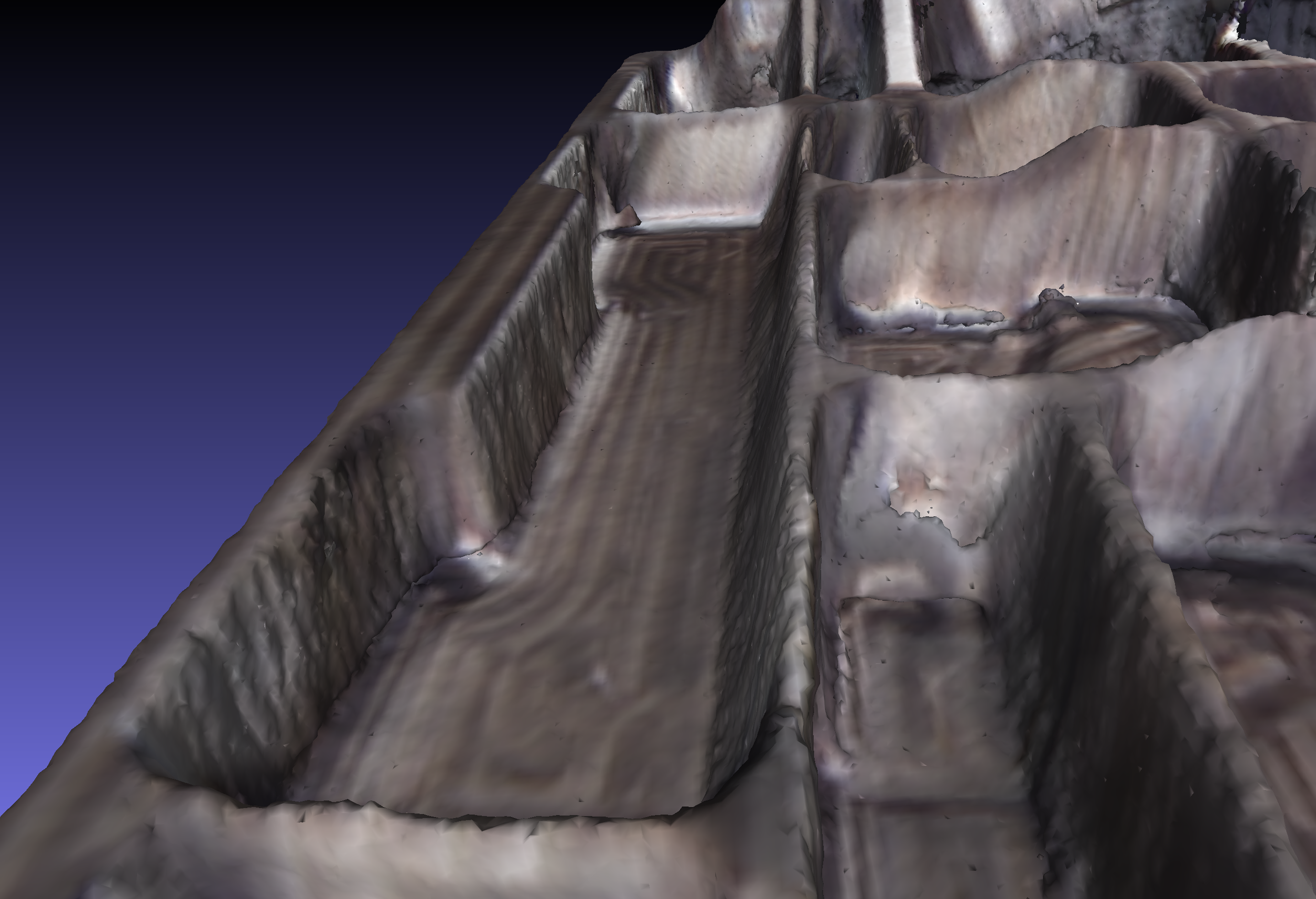
Figures Above: Creation of a mesh from a highly reflective part
Industrial Reconstruction can easily be set up by simply running the command “pip3 install open3d”, and then cloning and building the repository like any other ROS 2 package. The TSDF algorithm provided by Open3D appears to be less susceptible to the edge issues seen in yak and it outputs fully colorized meshes. Having color in the meshes allows for greater ease of use when trying to manually create toolpaths, or may be used to drive segmentation for toolpath planning, all while giving more confidence to users in the accuracy of the generated mesh. On top of this, a live feed of the reconstruction in progress can be visualized in RVIZ. This enables users to go back and scan areas that are missing before exporting the mesh and potentially discovering the missing parts later, requiring a full rescan.
Live creation of a colorized mesh
Industrial Reconstruction is already in use today on multiple projects including our Scan N Plan workshop. We’re excited to see the projects that this new repository enables.