

Scan-N-Plan Workshop Documentation Refresh
/Scan-N-Plan technologies provide tools for real-time robot trajectory planning based on 3D scan data, addressing the limitations of traditional industrial robot programming methods like teach-pendant programming or offline simulation. This approach is ideal for applications where:
- High part variability makes manual programming impractical
- CAD models are unavailable
- Flexible or deformable parts prevent pre-programming
- Part-to-part variability cannot be handled with static programming
- Flexible or no fixturing is required
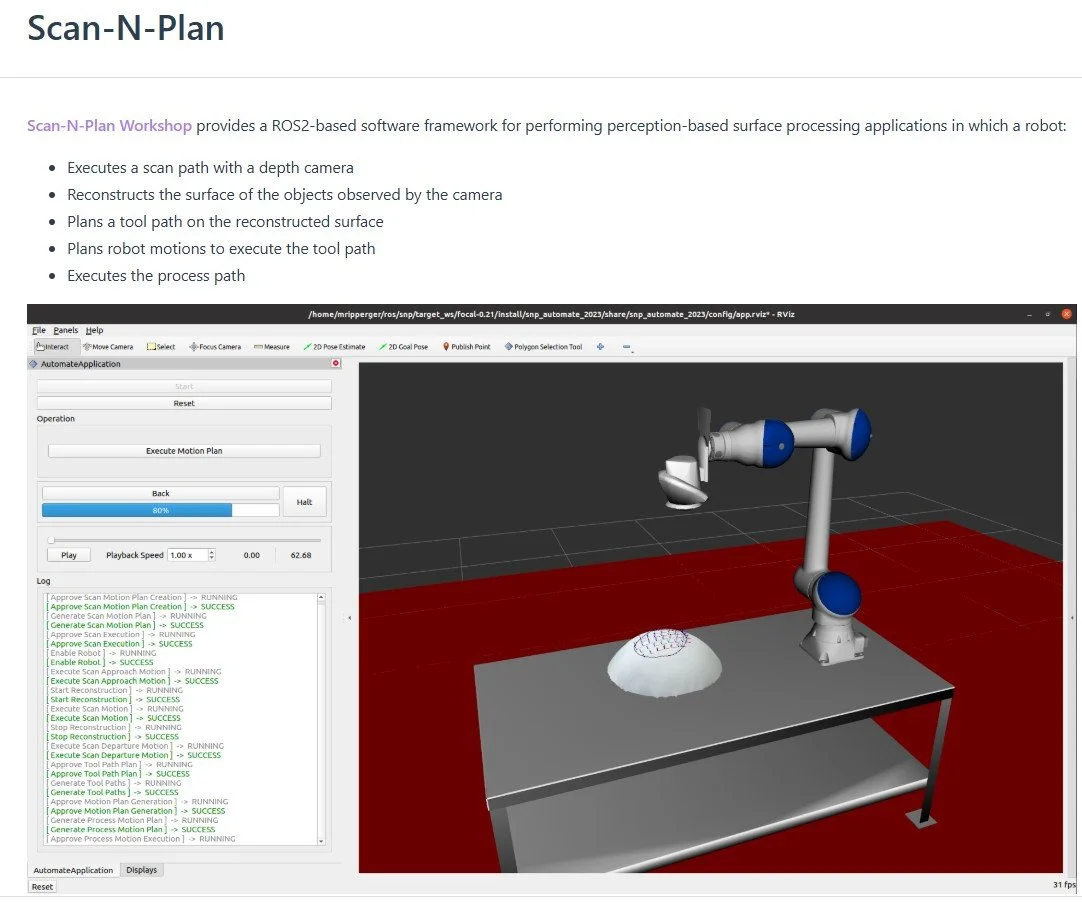
The ROS-Industrial Consortium has been advancing tools to support the development of innovative end-user applications and has made them accessible for broader use. The scan_n_plan_workshop offers a ROS 2-based software framework for perception-driven surface processing, providing all the foundational elements needed to understand and implement Scan-N-Plan solutions.
Recently an updated documentation page was publisehd to serve as a comprehensive resource for developers and learners interested in Scan-N-Plan or in using ROS 2 to build industrial applications. It outlines what is included, how to get started, and how ROS 2 can be leveraged effectively.
Key features of the documentation include:
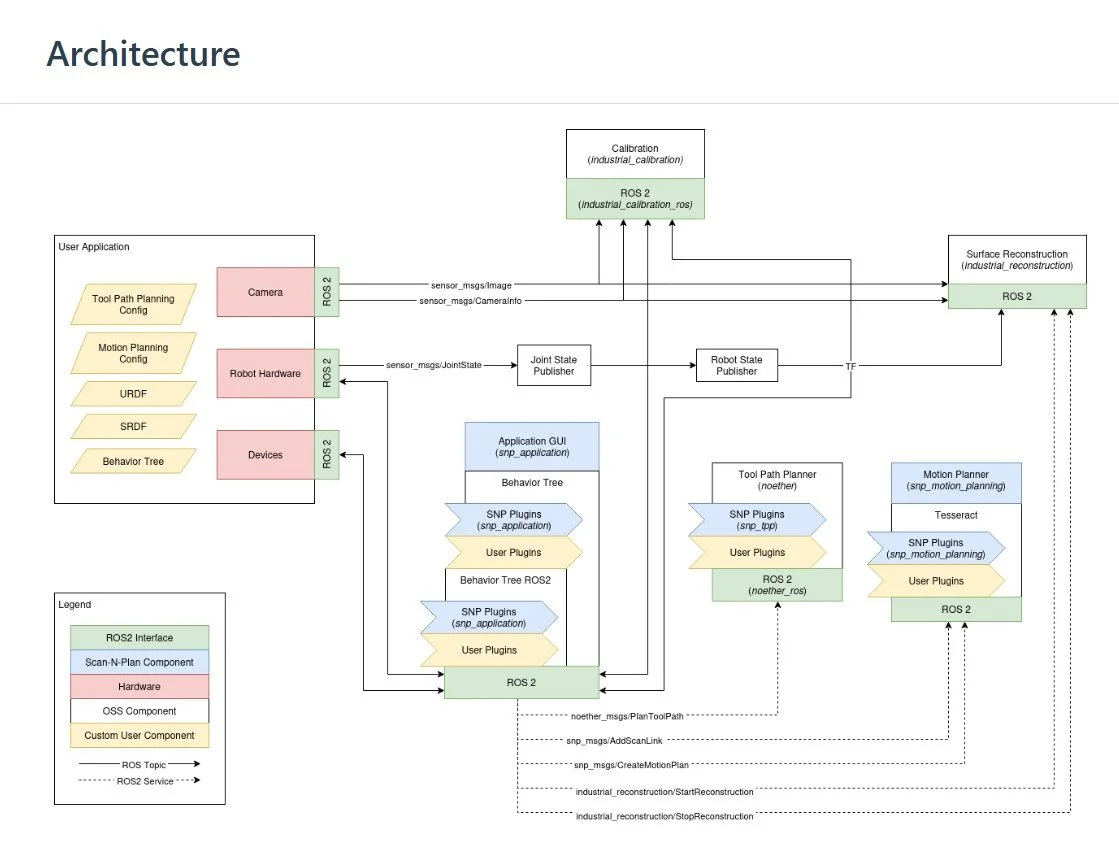
- A detailed architecture diagram
- Step-by-step instructions to get started
- Customization guidance using behavior tree plugins
- Example deployments for reference
We’re excited to see how the community adopts and engages with these resources. If you have any questions or requests, don’t hesitate to reach out!