

New Tools for Robotics: RQT Frame Editor and the pitasc Framework
/As robotics continues to expand into industrial and collaborative environments, researchers and developers are working on tools that make robots easier to configure, teach, and reconfigure for real-world tasks. In a recent talk, Daniel Bargmann (Fraunhofer IPA) introduced two powerful software solutions designed for exactly this purpose: the RQT Frame Editor and the pitasc Framework.
RQT Frame Editor – Simplifying TF-Frame Management
The RQT Frame Editor is a ROS plugin that makes working with TF-frames more intuitive. Instead of editing configuration files manually, users can visually create, arrange, and adjust frames within the familiar RQT and RViz environments.
Key features include:
Interactive frame manipulation – Move, rotate, or manually set values for frames.
Copy and reuse poses – Copy positions or orientations from existing frames.
Mesh visualization – Attach meshes (including custom STL files) to frames and view them in RViz.
Frame grouping and pinning – Organize frames by groups or “pin” active frames for efficient workflow.
ROS service integration – Use frame editor functionality programmatically in your own applications.
These capabilities are especially valuable for developers working on multi-robot setups, simulation environments, or applications that require frequent TF-frame adjustments.
Documentation and source code are available on GitHub
pitasc – A Skill-Based Framework for Force-Controlled Robotics
The second tool highlighted in the presentation is pitasc, a robot control framework designed for force-controlled assembly and disassembly tasks. Unlike traditional, vendor-specific robot programming approaches, pitasc uses a skill-based programming model.
In practice, this means developers do not write low-level motion code directly. Instead, they arrange and parameterize skills—reusable building blocks that range from simple movements (e.g., LIN or PTP) to advanced behaviors that combine position and force control across different dimensions.
Real-World Applications
pitasc has already been deployed across a wide variety of industrial use cases, including:
Assembly of plastic components
Riveting, screwing, and clipping tasks
Flexible robot cells with rapid reconfiguration
Dual-arm coordination, such as automated wiring of electrical cabinets
This flexibility allows pitasc to support both collaborative robots and industrial robots, bridging the gap between research and production environments.
Documentation and source code available are available here.
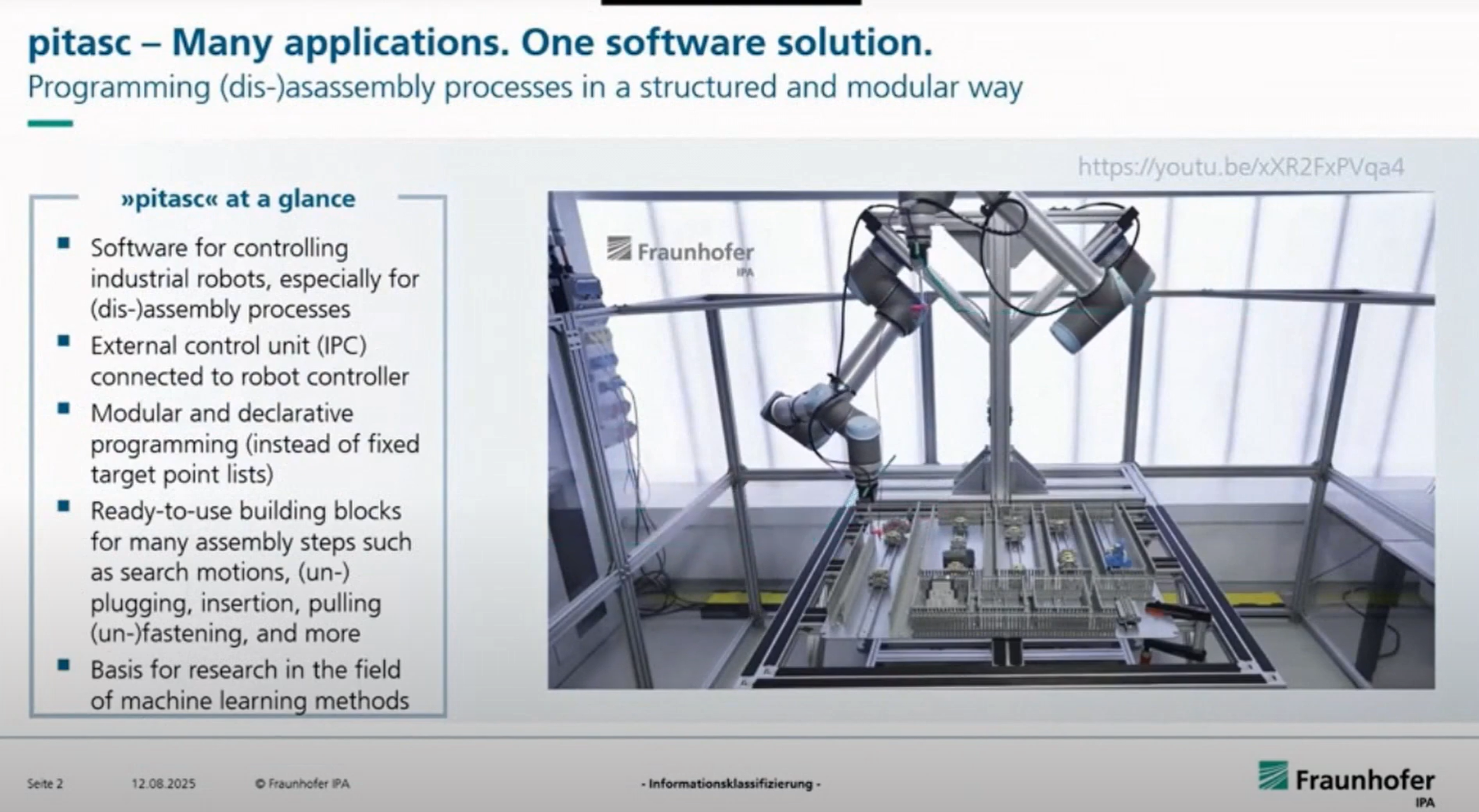
pitasc at a glance
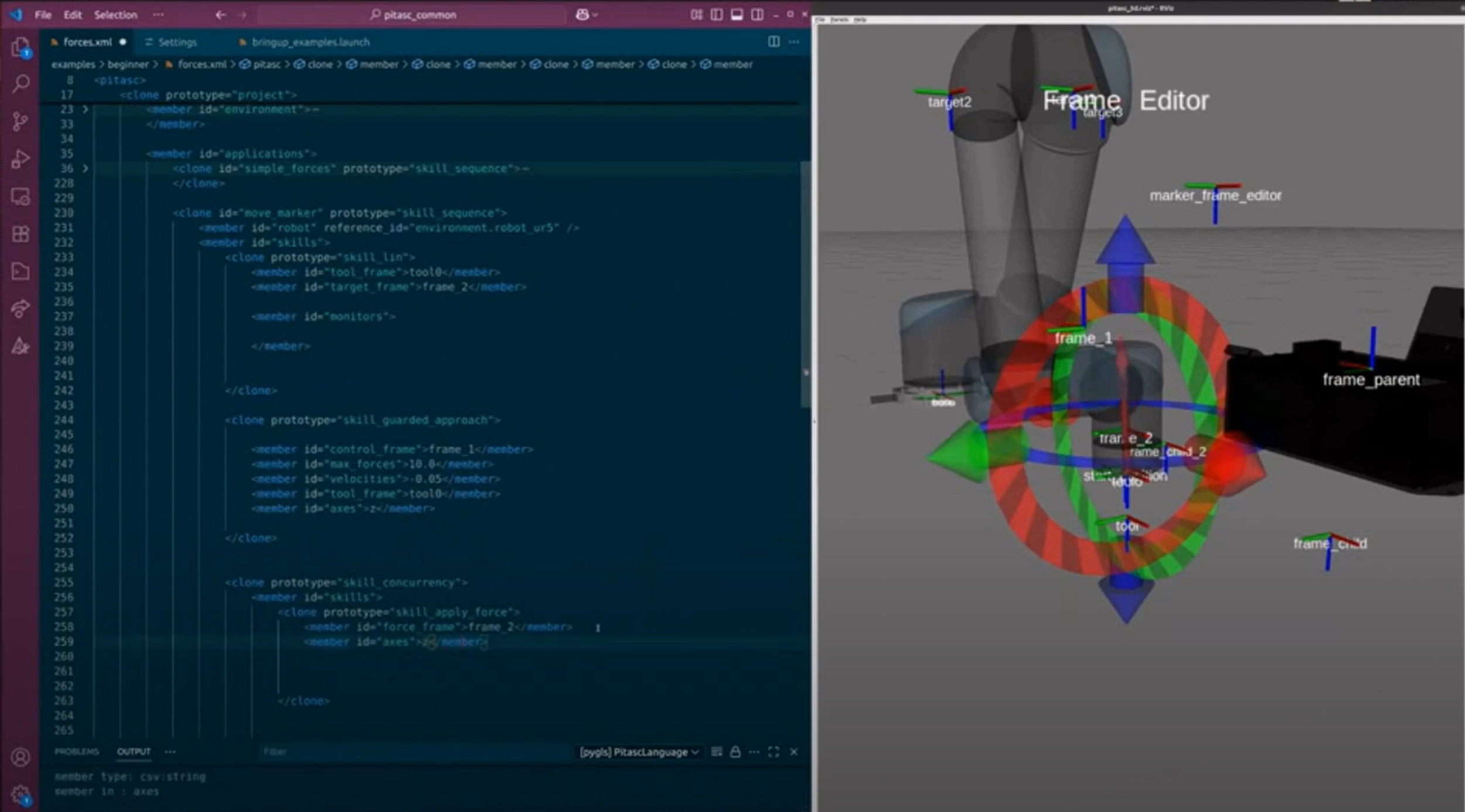
Live demo of rqt frame editor and pitasc
Watch the full talk by Daniel Bargmann on YouTube to see live demos of both the RQT Frame Editor and pitasc in action, including real-world examples of assembly and disassembly tasks