

ROS-Industrial Consortium Europe is heading towards ROS2
/With the growing excitement and curiosity surrounding ROS2, ROS-Industrial Consortium Europe (RIC-EU) had the pleasure to host the Spring 2019 edition of the RIC-EU Tech Workshop. It took place on May 6th and 7th at Fraunhofer IPA in Stuttgart, Germany. Some of the main drivers of DDS and ROS2 developments personally presented their insights and gave hands-on sessions during the event. For this, participants were provided with USB sticks with Ubuntu Bionic and ROS Melodic and ROS Crystal pre-installed (just as for all our ROS-Industrial trainings). The event has been free for worldwide members of any ROS-Industrial Consortium and was fully booked out with 40 people attending from all over Europe.
On Day 1, the workshop started with RIC-EU manager Thilo Zimmermann who welcomed the participants at Fraunhofer IPA and introduced the ROS-Industrial Consortium Europe and its EU project funding opportunity (next cut-off dates June 14 and September 13, 2019).
As ROS 2 supports multiple DDS/RTPS implementations, RIC-EU proudly hosted one of the most popular DDS vendors, eProsima, to explain the main concepts of DDS and present their stack at the workshop. During the five hours of presentations and hands-on workshops, Borja Outerelo Gamarra and Jaime Martin Losa covered topics like DDS Introduction, presentation of the standard and motivation of DDS & DDS Architecture, and DDS QoS. Attendees practised on a “hello world” example. ePROSIMA's slides can be found here.
![20190506_142557[1].jpg](https://images.squarespace-cdn.com/content/v1/51df34b1e4b08840dcfd2841/1557762581422-SXQ6AJGMPZ2QCGMTQUGW/20190506_142557%5B1%5D.jpg)
On Day 2, Ralph Lange from RIC-EU member BOSCH gave an in-depth presentation of the current status of ROS2. He included hands-on tasks using ROS2 and sow new features and also provided information on the upcoming d-turtle “Dashing Diademata” release on May 31, 2019. Ralph's presentation slides "Current Status of ROS2 - Hands-on Feature Overview" can be found here.
![20190507_090637[1].jpg](https://images.squarespace-cdn.com/content/v1/51df34b1e4b08840dcfd2841/1557762657452-AV4EXOUCNSCB2NU3CVDB/20190507_090637%5B1%5D.jpg)
The second presentation by Ingo Lütkebohle, also from BOSCH Corporate Research, introduced the micro-ROS activity. Ingo is one of the investigators of the EU funded OFERA project, which ports ROS2 to “extremely resource constrained devices” (usually, microcontrollers) with the new DDS XRCE standard. He demonstrated this by using a Cortex M4 board mounted on a first generation Turtlebot. Ingo's presentation slides can be found here.
![20190507_113032[1].jpg](https://images.squarespace-cdn.com/content/v1/51df34b1e4b08840dcfd2841/1557762750934-ICC3ROHLLWEUJKIM9VSW/20190507_113032%5B1%5D.jpg)
{kind=link}
{kind=link}
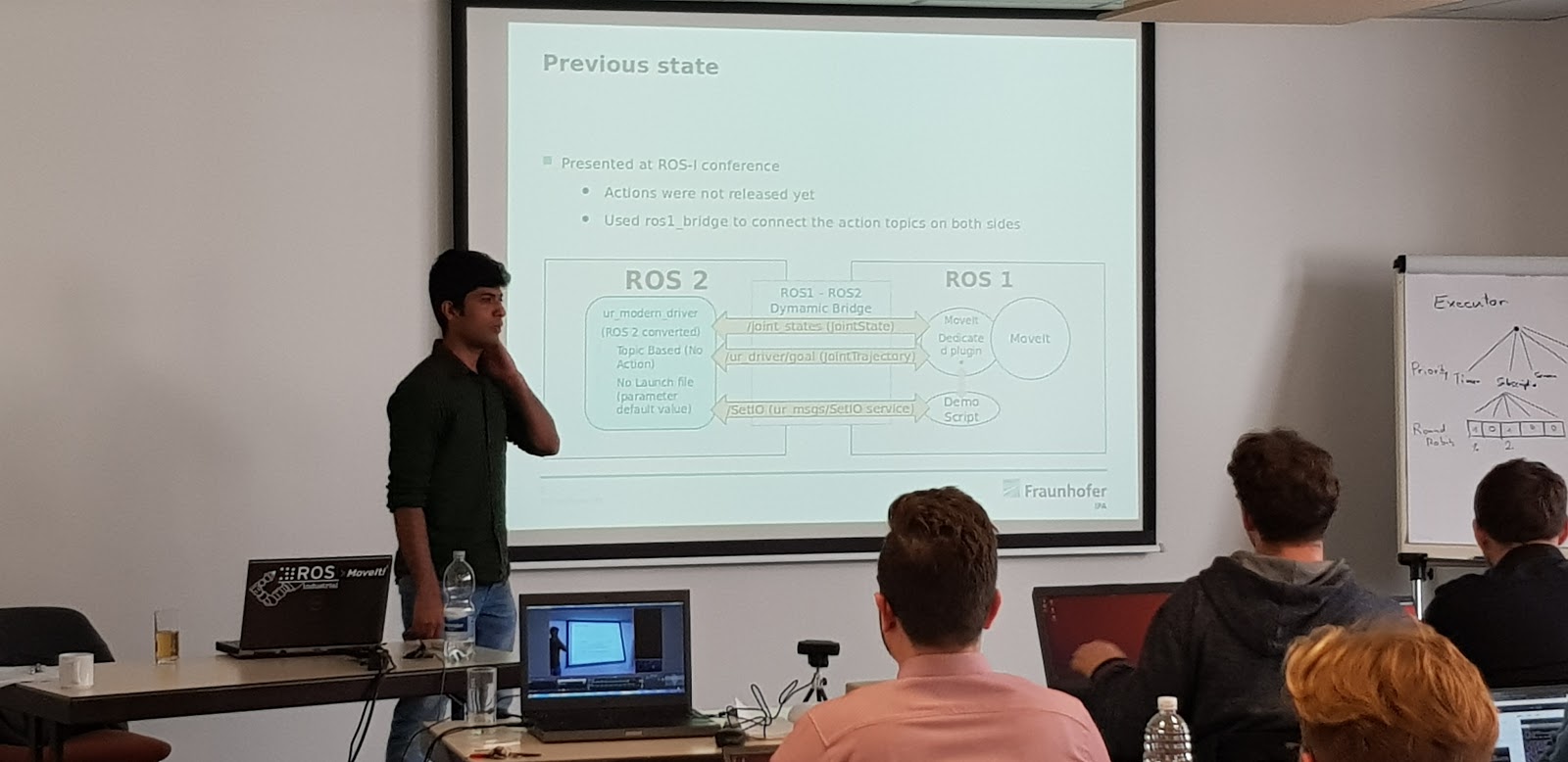
After a lunch break, Ludovic Delval of Fraunhofer IPA gave a hands-on workshop on how to migrate ROS1 node to ROS2. Lastly, Harsh Deshpande, also from Fraunhofer IPA, previewed the porting of the ur_modern_driver to ROS2 and presented a proposal for the action_bridge, which currently bridges between ROS1 action client and ROS2 action server.
{kind=link}
At the end of the workshop, participants and ROS-Industrial Consortium members agreed that 2019 is promising a lot of developments in ROS2. In April at ROS-I Consortium Americas 2019 Annual Meeting, RIC members interacted and exhibited an interesting panel session titled “Is ROS2 Ready for the Factory Floor”. In June, Ludovic Delval of Fraunhofer IPA will present the latest updates at ROSCon France in Paris and Harsh Deshpande at the ROS-Industrial AP Workshop 2019 in Singapore.
The next RIC-EU Tech Workshop is foreseen for Fall 2019 (tentative dates October 09-10). The 2019 edition of the ROS-Industrial Conference is planned on December 10-12, 2019 (save the date!).