

Tesseract & ROS-I Developer Monthly Meeting Revisit
/ROS-I Developer Meeting
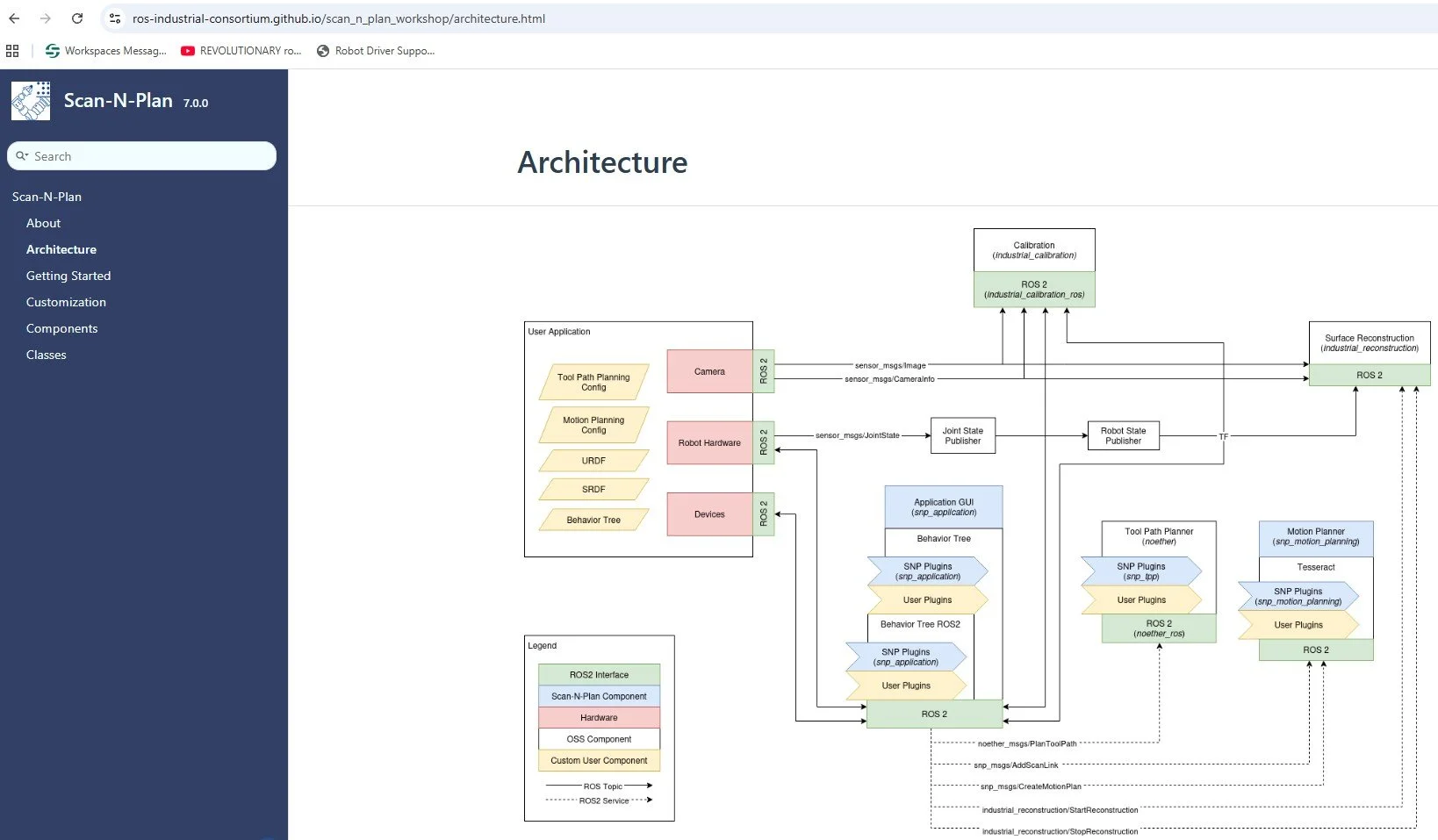
This was the second quarter ROSI Developer Meeting Americas, led by Matt Robinson, focusing on recent GitHub repository updates and documentation improvements. Matt presented new documentation pages for the Scan and Plan Workshop and Noether repositories, showcasing enhanced architecture diagrams and status information.
Michael discussed updates to Python bindings for Tesseract using NanoBind, noting improvements over the previous Swig implementation and plans for code reorganization. The team also discussed upcoming events including a July training session and Automate 2026 exhibition in Chicago, where they will host an open source meetup and ROS Industrial Consortium gathering.
Matt shared updates on OSRA's technical strategy development and concerns about ROS-2 release processes affecting industrial users, particularly regarding RMW and version compatibility issues. The conversation ended with Michael announcing plans to update all repositories to support Ubuntu 20.04 LTS, including necessary changes for QT5 to QT6 transition.
Tesseract Monthly Check-In
The meeting focused on discussing OMPL 2.0's new VAMP (Vectorized Antipodal Motion Planning) integration and Tesseract's 1.0 release updates.
The team explored how VAMP's SIMD acceleration and parallel collision checking capabilities could be integrated into Tesseract, with Levi and Michael explaining that VAMP uses fine-grained parallelism to process thousands of states simultaneously rather than checking single states sequentially.
Roelof provided an update on the Cole continuous collision checking implementation, reporting significant performance improvements of 20-30% and noting that the implementation now matches Bullet's approach using convex hulls.
The team also discussed ongoing work on replacing string-based data structures with hash-based ones to improve performance, and Levi mentioned plans to implement schema validation tools for easier YAML file management in Tesseract.
Information on ROS-I Developer Meetings may be found here: https://rosindustrial.org/developers-meeting
Info on the Tesseract Monthly Check-In may be found here: https://rosindustrial.org/tesseract-robotics
