ROS Industrial Conference #RICEU2018 (Session 4)
/From public funding opportunities to the latest technologies in software and system integration, the combination of robotics and IT to hardware and application highlights: ROS-Industrial Conference 2018 offered a varied and top-class programme to more than 150 attendees. For the sixth time already, Fraunhofer IPA organized a ROS event in Stuttgart to present the status of ROS in Europe and to discuss existing challenges.
This is the fourth instalment of a series of four consecutive blog posts, presenting content and discussions according to the sessions:
- EU ROS Updates (watch all talks in this YouTube playlist)
- Software and system integration (watch all talks in this YouTube playlist)
- Robotics meets IT (watch all but 1 talks in this YouTube playlist)
- Hardware and application highlights (watch all but 1 talks in this YouTube playlist)
Day 3 - Session “Hardware and Application Highlights“

Georg Heppner (FZI) and Fabian Fürst (Opel) At ROS-Industrial Conference 2018
In the fourth and final session of the ROS-Industrial Conference 2018, the focus was on hardware developments and applications implemented in industrial use cases. Fabian Fuerst, Opel, and Georg Heppner, FZI, delivered the session keynote. They presented their solution for flexible automotive assembly with industrial robotic co-workers. The application was developed as part of the EU EuRoC project. In this four-year competition, more than 100 participants initially worked on new robotic solutions for the manufacturing industry. In the course of several evaluation rounds, the team from FZI, Opel and MRK Systeme GmbH was able to assert itself successfully to the end.
During the course of the project, the FZI developed an automated robotic assembly for flexible polymer door sealings on car doors. The sealing is a closed ring, which has to be fixed with up to 40 plastic pins depending on the model, an ergonomically unfavourable task that could not be automated until now. The developed assembly cell is very flexible and open, so that the robot can be used without a safety fence. For this purpose, an external force control was developed that can be used easily and directly also for numerous other robots as a package of ROS-Industrial. The CAD-2-PATH software is used for the simple path creation for the robot. This enables a quick adjustment to other door models and does not require any expert knowledge. This is important because there are different door models and sealing types and the automation solution must be adaptable accordingly and quickly. It is notable that the application received positive assessment from Opel with regards to safety, typically a sensitive topic when applying novel tools such as ROS in automotive applications.

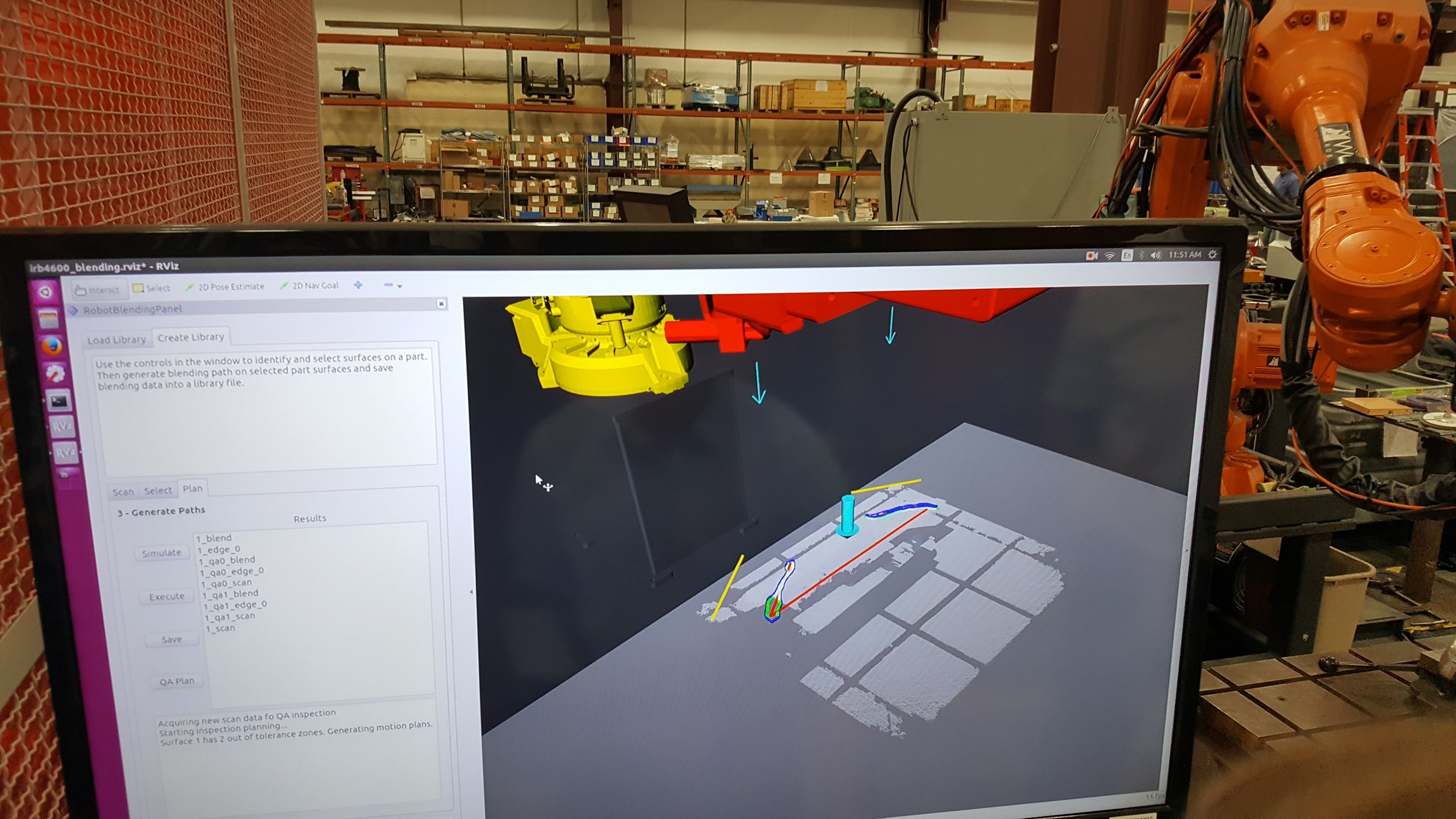
Paul Evans (Southwest Research Institute / ROS-Industrial North America) at ROS-Industrial Conference 2018
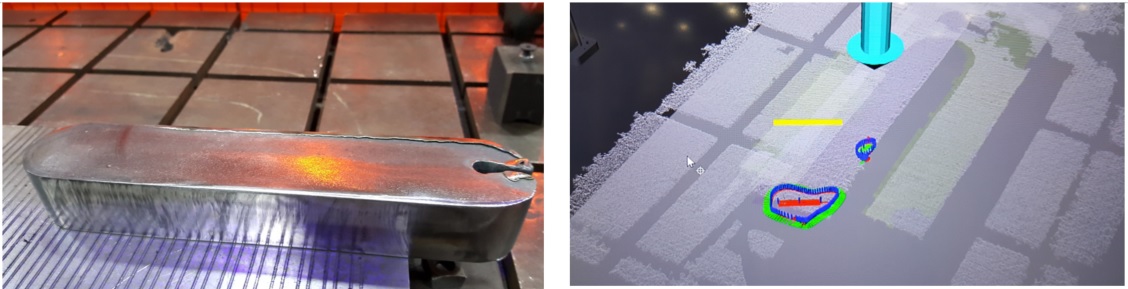
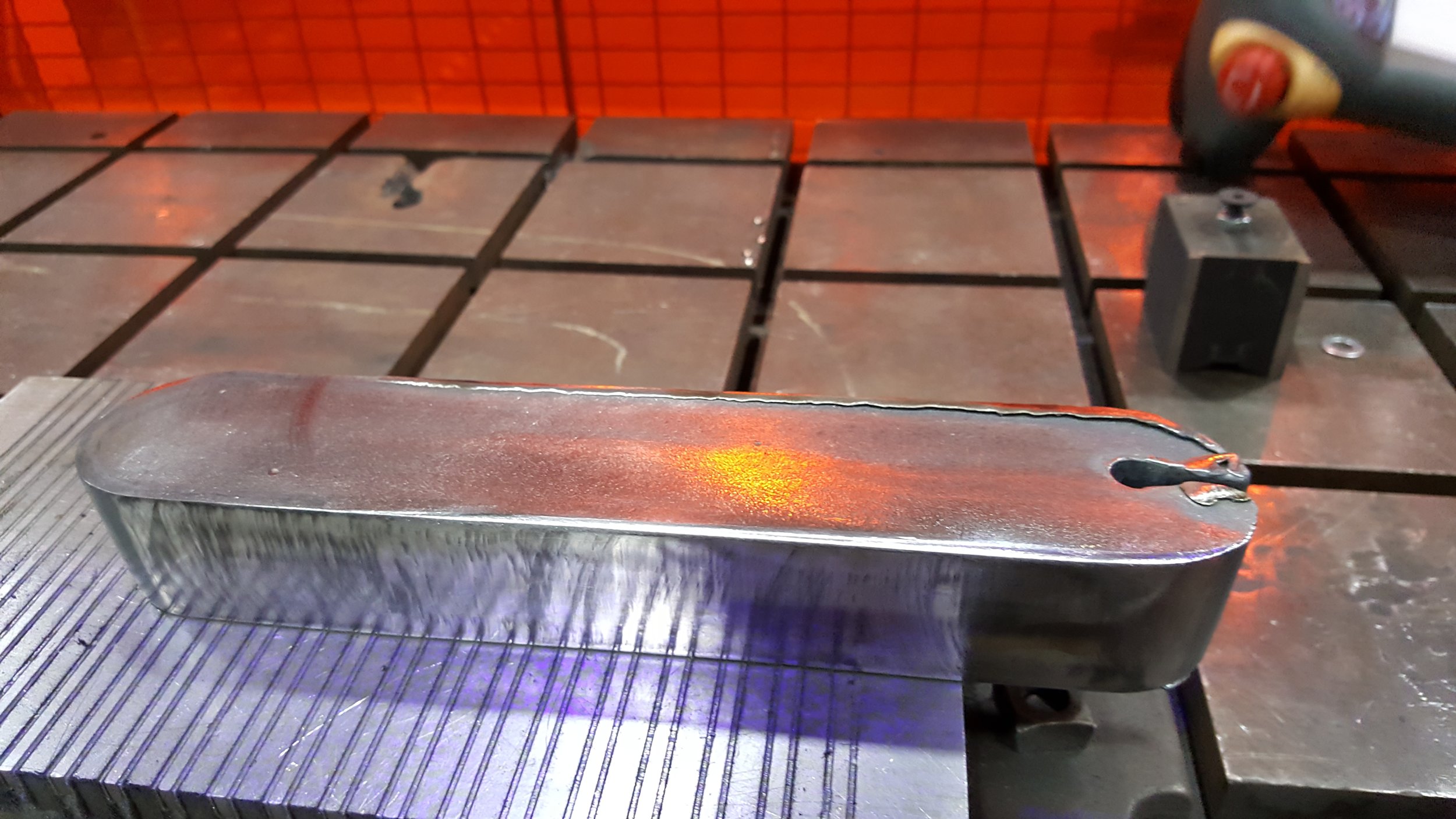
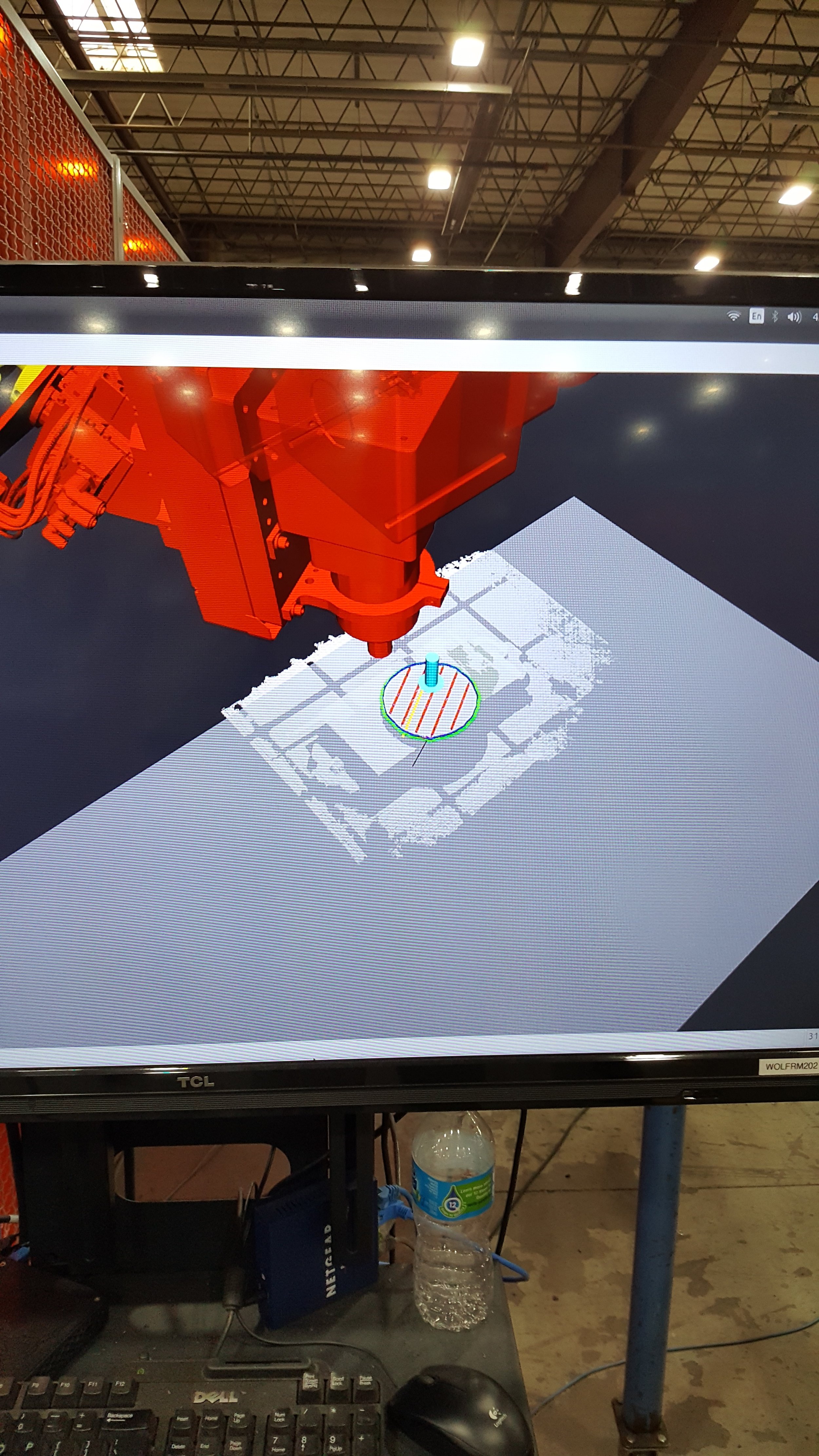
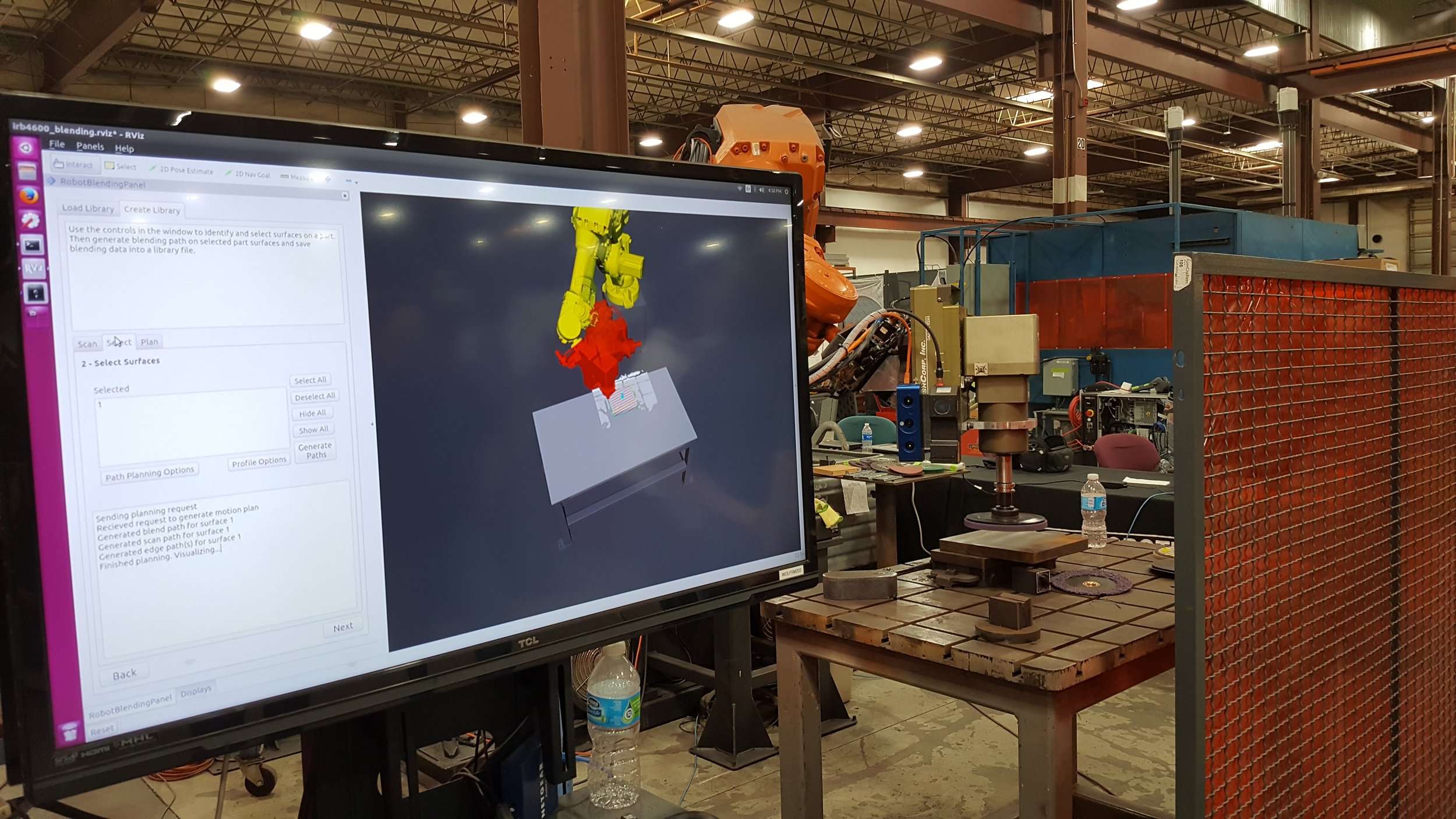
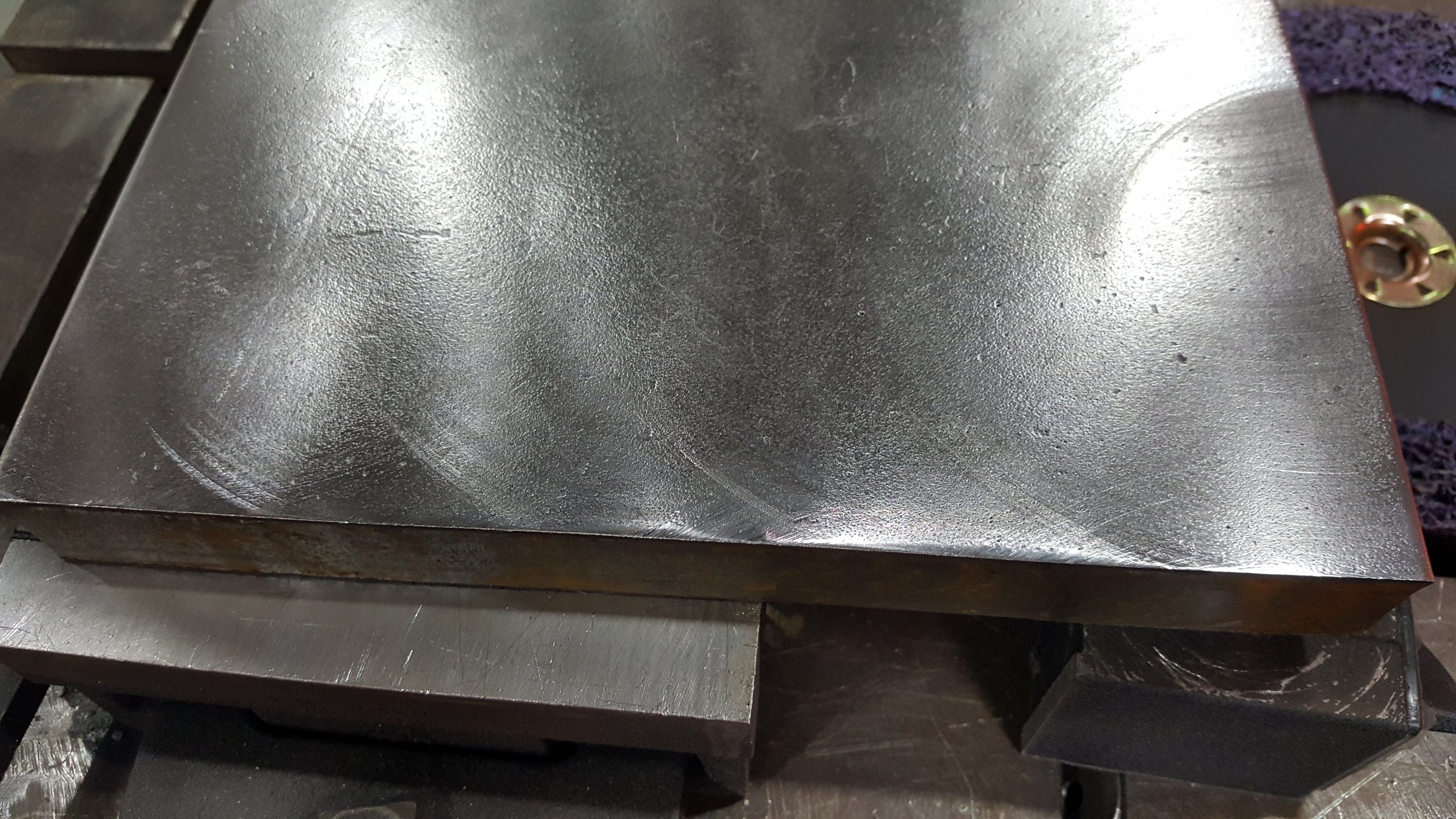
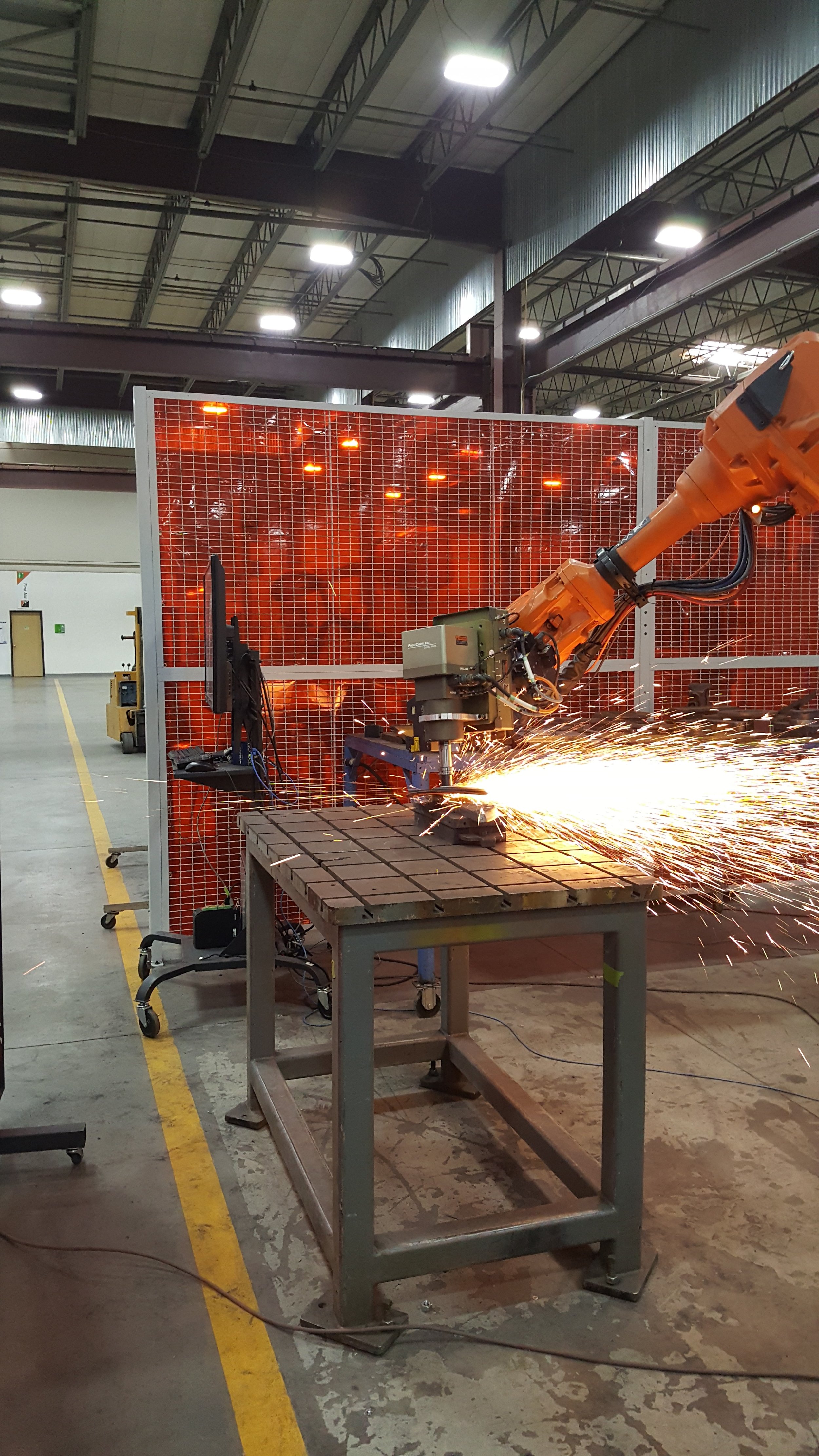
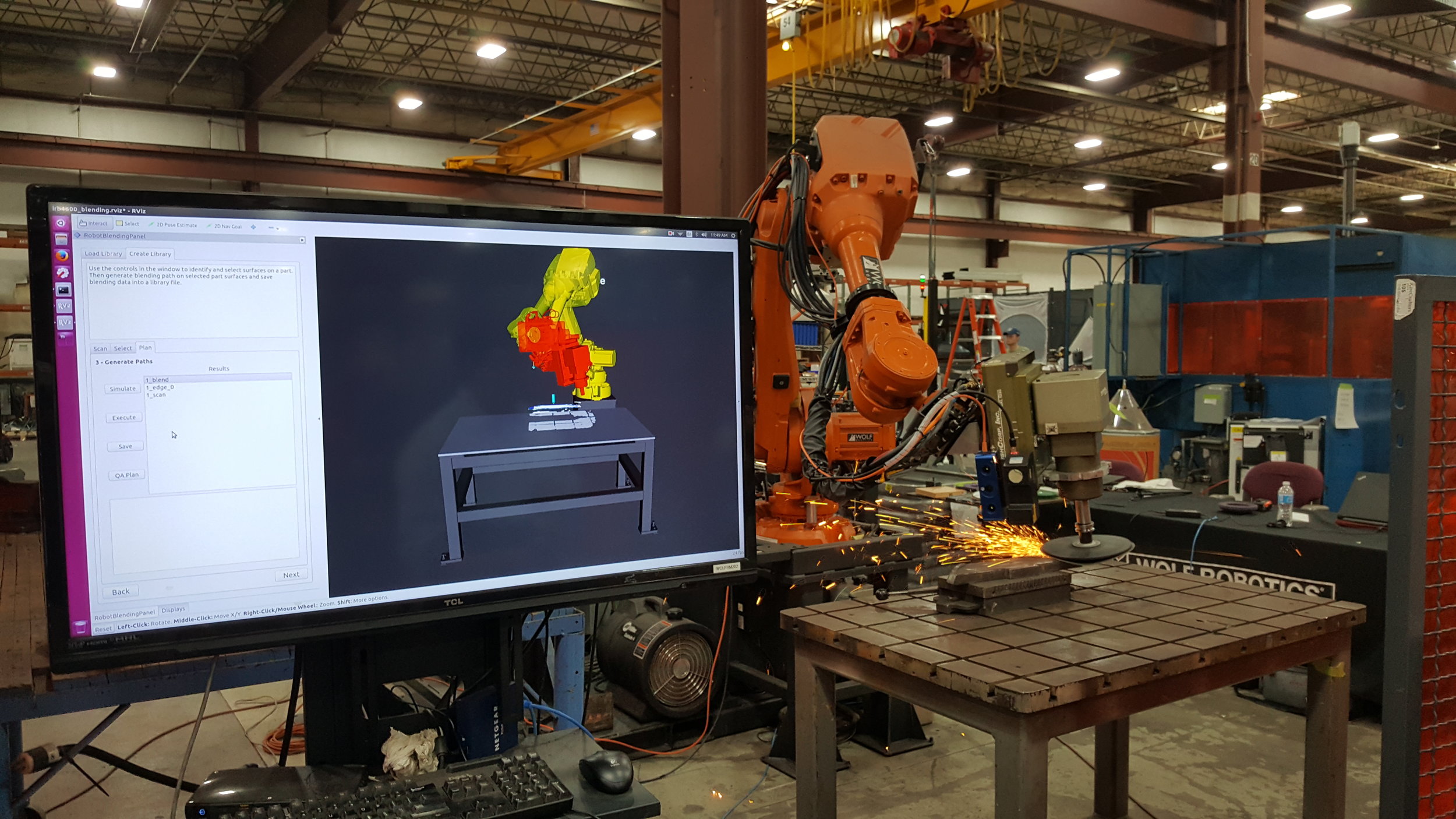
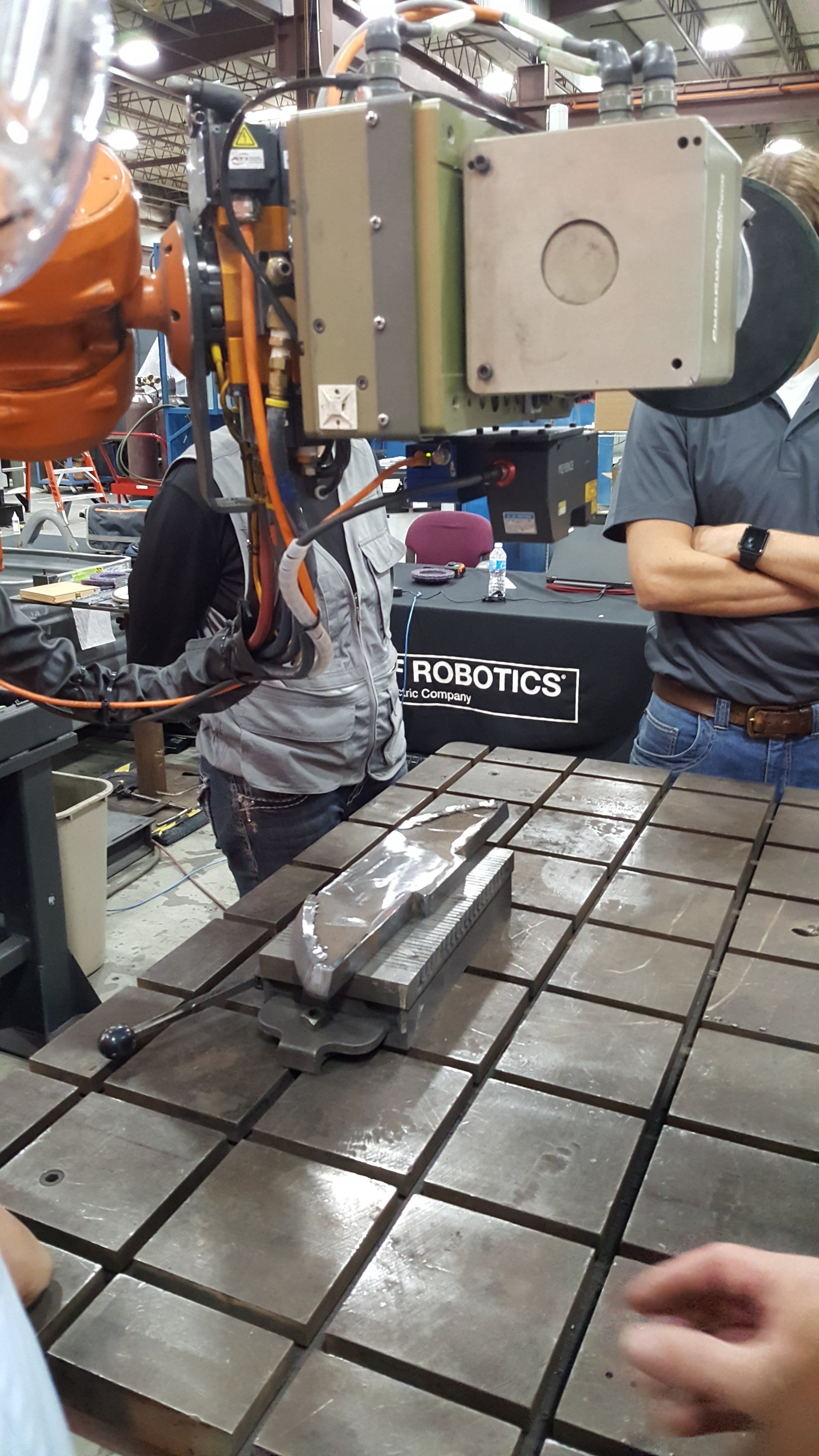
The presentation by Paul Evans, Southwest Research Institute and ROS-Industrial Consortium North Americas, provided current information on the activities of the North America Consortium such as strategic initiatives, trainings, and networking activities. These also focus on voices of members and include activities for the strategy alignment, for more robustness and flexibility and agility. There are also collaborations with OEMs who support ROS or develop their own drivers. At the ROS-I Consortium Americas Annual Meeting 2018, different applications were presented, for example an order batch picking robot from Bastian Solutions and a robotic system for agile aerospace applications like sanding, blending, drilling etc. for the U.S. Air Force. A last highlight that Evans presented was the ROS-I collaboration with BMW and Microsoft. While RIC-North Americas supported the evaluation of simulation environments that included physics engines the RIC-EU partners provided additional navigation support and training for mobile robots at the BMW plant to support assembly logistics. The solution is deployed on Microsoft Azure.
Mobile robots was also the topic of the lecture by Karsten Bohlmann, E&K Automation. He presented solutions for ROS on AGVs and perception-driven load handling and PLC interfaces.

Arun Damodaran (Denso) at ROS-Inudstrial Conference 2018
Denso Robotics Europe was present at the conference with Arun Damodaran, who talked about Cobotta, the ROS-enabled collaborative robot. This is a six-axis arm with a reach of 342 mm, a repeatability of 0,05 mm and a payload of 500 g. It has an inherently safe design, meets all requirements for safety-standards corresponding to the ISO norms and is compliant thanks to safety-rated monitored function. Another advantage is its easy set-up and use. This is realized by the usage of the robot programming software drag&bot. Developed by the spin-off of the same name of Fraunhofer IPA, the software enables the programming of robots like Cobotta with the drag and drop principle. No expert knowledge is needed. The software is also based on ROS, works independently from any robot manufacturer and can be reused as well as shared via the cloud. Denso has been engaged in the development of ROS components and packages (simulation, control, path creating) for its robots since 2012 and now uses an open platform for controlling the Cobotta.
Felipe Garcia Lopez from Fraunhofer IPA focused on a networked navigation solution for mobile robots in industrial applications. This is particularly useful for changing environments in which mobile robots should independently select free routes. Fraunhofer IPA and Bär Automation, for example, have implemented a navigation solution for agile assembly in automobile production. With this, AGVs can locate themselves robustly and precisely based on sensor data, even without special infrastructure. This makes it possible to easily adapt existing paths or integrate new ones even after commissioning. Since the software's sensor fusion module can process data from almost any sensor, very customer-specific solutions can be implemented.
Another example is the networked navigation for smart transport robots at BMW. Here as well there were few static landmarks, a lot of dynamic obstacles and sparse sensor data in large-scale environments. A process reliability of more than 99% had to be fulfilled. The presented navigation as well as the vehicle control are ROS-based. At the end of the presentation, an outlook into Cloud-Navigation was given: Mobile robots and stationary sensors are then connected using a Cloud-based IT-infrastructure. The environment is cooperatively modelled and SLAM is used. This enables also solutions for “Navigation-as-a-service” meaning map updates and cooperative path planning for each robot. With Cloud-Navigation, local hardware and computational resources can be reduced and the quality and flexibility of the overall navigation system is enhanced.

Thomas Pilz (Pilz GmbH & Co. KG) at ROS-Inudstrial Conference 2018
ROS as an appropriate solution both inside and outside of industry – this was the starting point for Thomas Pilz, Managing Partner of family owned company Pilz. Combined with his own career and his experience with the first service robots, lightweight robots and robots outside production environments, he first described how the question of safety standards has changed in recent years. The definition and understanding of a robot is currently in the process of changing significantly. For Pilz, systems such as the Care-O-bot® from Fraunhofer IPA are the new upcoming robots. They operate outside of cages, are mobile and users can easily interact with them and program them using ROS. He sees ROS as a success factor for service robots because of its modular design, its standardization, additional flexibility through programming languages and its networked, interoperable system in line with Industry 4.0.
Robots that are to interact with humans are also changing the required safety technology at Pilz in the long term because all previous infrastructure such as fences is no longer required. This led Pilz to develop its own robot arm with appropriate safety technology. They use ROS modules developed by Pilz because they are breaking new ground with the development of the robot arm and can thus fall back on a broad programming knowledge base. They had nothing to lose with the new product. However, in order for them to meet the safety standards, the modules must no longer be changed in an uncontrolled manner. To improve this, Pilz recommends changing the safety standards so that they are also amenable to Open Source. Finally yet importantly, he believes that the term robot manufacturer will also change, because this role will increasingly be fulfilled by those who implement the application and no longer by those who produce the robot or components for it. In the lively discussion after the presentation, Pilz once again emphasized two arguments in favour of ROS. First: When it is said that ROS is tedious, one should bear in mind that the development of proprietary software is also difficult. Second: ROS is tedious, but fun. Pilz also sees ROS as a decisive factor for employee satisfaction and as an argument for staying with Pilz.
At the end of the conference, Gaël Blondel from the Eclipse Foundation presented the Eclipse Foundation and its Robotics Activities. The platform with around 280 corporate members, half of them from Europe, provides a mature, scalable, and business-friendly environment for open source software collaboration and innovation. Eclipse is vendor-neutral and offers a business-friendly ecosystem based on extensible platforms. They offer their own IP management and licensing but also accept other business-friendly licenses. Several working groups are particularly engaged in development processes for robotics. One example for a robotic project managed with Eclipse is the EU project RobMoSys that aims to coordinate the whole community’s best and consorted efforts to realise a step-change towards a European ecosystem for open and sustainable industry-grade software development.
At the end of the event, Mirko Bordignon and Thilo Zimmermann thanked the participants for another great and record breaking ROS-Industrial Conference. Presentations and videos of the event have been made available on the event website: https://rosindustrial.org/events/2018/12/11/ros-industrial-conference-2018