

Recapping the 2020 ROS-I Americas Annual Meeting
/The 8th ROS-Industrial Consortium Americas Annual Meeting was held March 4-5, 2020, at Southwest Research Institute in San Antonio, Texas. It reminded us of both how far we have come, yet how much there is to be done. As is the tradition with this event, the first day was open to the public, while day two focused on the membership and the mission of the consortium, and what we can do as a body to further leverage open-source for industry.
For those who could not attend due to COVID-19 travel restrictions, we offered video conferencing. In some cases, we had to adjust the speaking schedule to accommodate for remote presentations. All of the Day 1 presentations and videos can be found on the event page, while all the Day 2 content is at the ROS-I Consortium Member Portal.
Day 1 – Overview, Panel & Tours
Day one kicked off with an introduction by SwRI’s Paul Evans followed by a Consortium Overview, by Matt Robinson, and a more technically focused talk on deploying ROS for industrial automation by SwRI’s ROS-Industrial Americas Technical Lead Levi Armstrong. This highlighted recent production deployments, addressed recent challenges, and discussed development of novel new capability for the end-user site.




The morning continued with a talk by Roger Barga, GM of AWS Robotics, on the Role of the Cloud in the Future of Robotics. Here Roger highlighted practical applications of cloud computing with regards to robotics application development, testing and deployment support. Currently AWS is supporting ROS, ROS2, and Gazebo within their services, and provide additional tools to facilitate adding features to applications such as text or speech recognition and security. A case study featuring member Bastian Solutions was shared and a call for multi-robot simulation use cases was put out to attendees.
Alex Shikany, VP of Membership & Business Intelligence of A3, spoke on the role of robotics on employment. Here the point was made that in times of investment in automation, unemployment also declines, indicated that for the U.S. that investment in automation coincides with increased hiring. Essentially, though there is an increase in the amount of work being automated, this doesn’t manifest in fewer jobs; the jobs evolve.
A panel discussion featuring Joshua Heppner of Intel, Lou Amadio from Microsoft, and Roger Barga from AWS fielded questions relating to cloud, sustainability, education, and areas for growth. The Americas Consortium has evolved in recent years with more engagement from the tech industry, as they seek to understand industry needs and how ROS and related applications can scale in robust, sustained ways.
To wrap up day one, Shaun Edwards and Paul Hvass of Plus One Robotics shared a perspective from the founders of ROS-Industrial. They challenged the community to think about breaking down barriers with a simple question: “Where is the Download Button?”
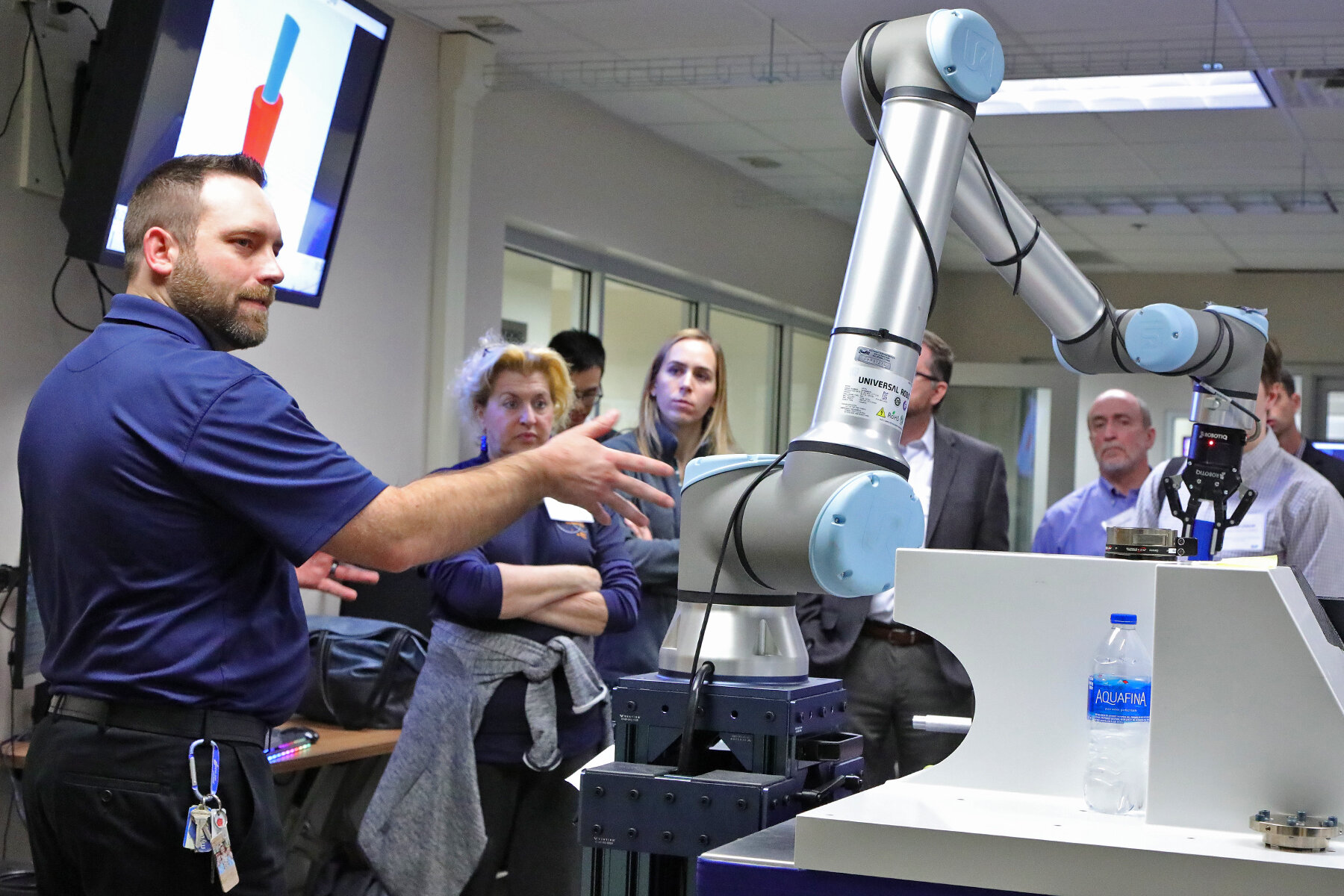
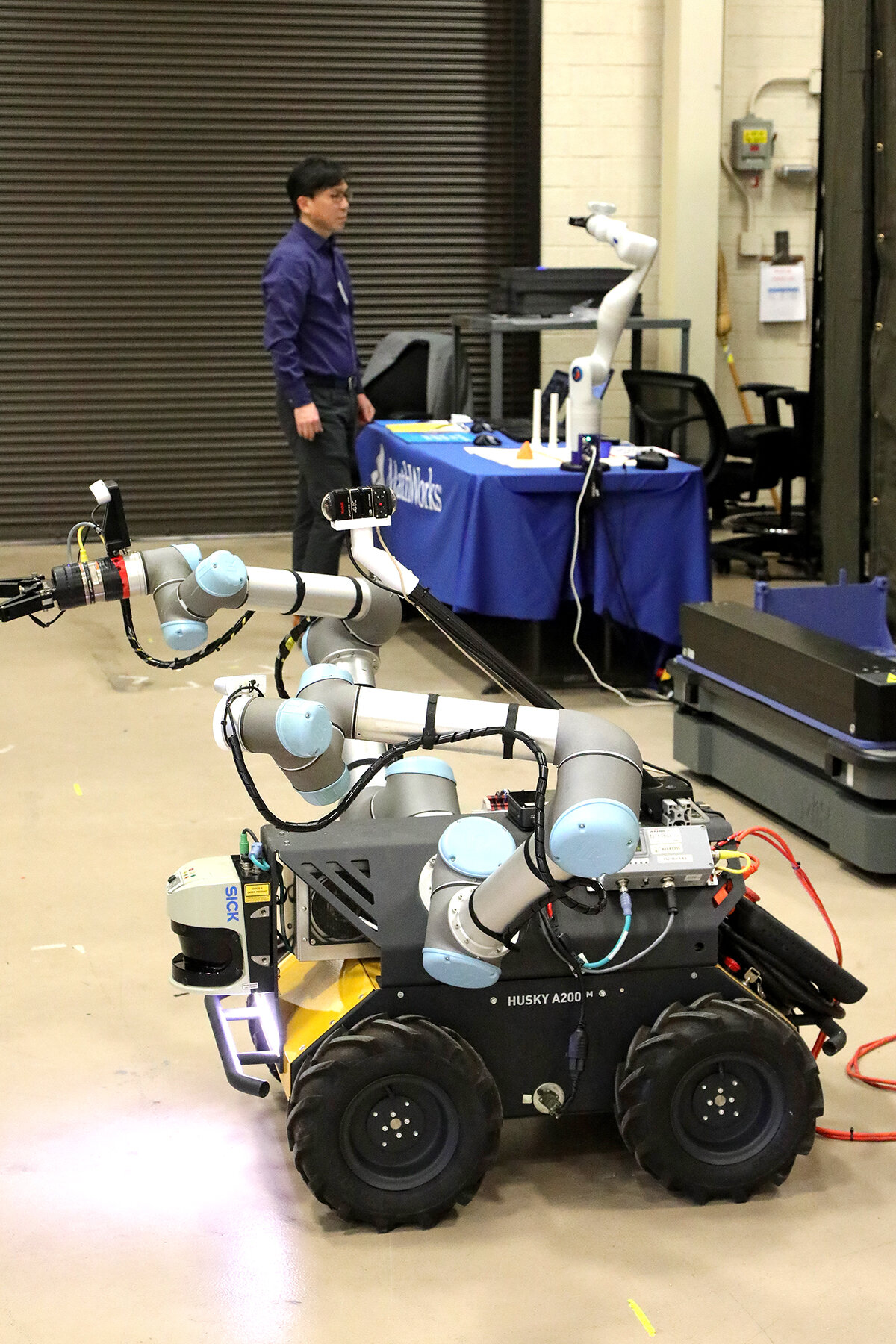
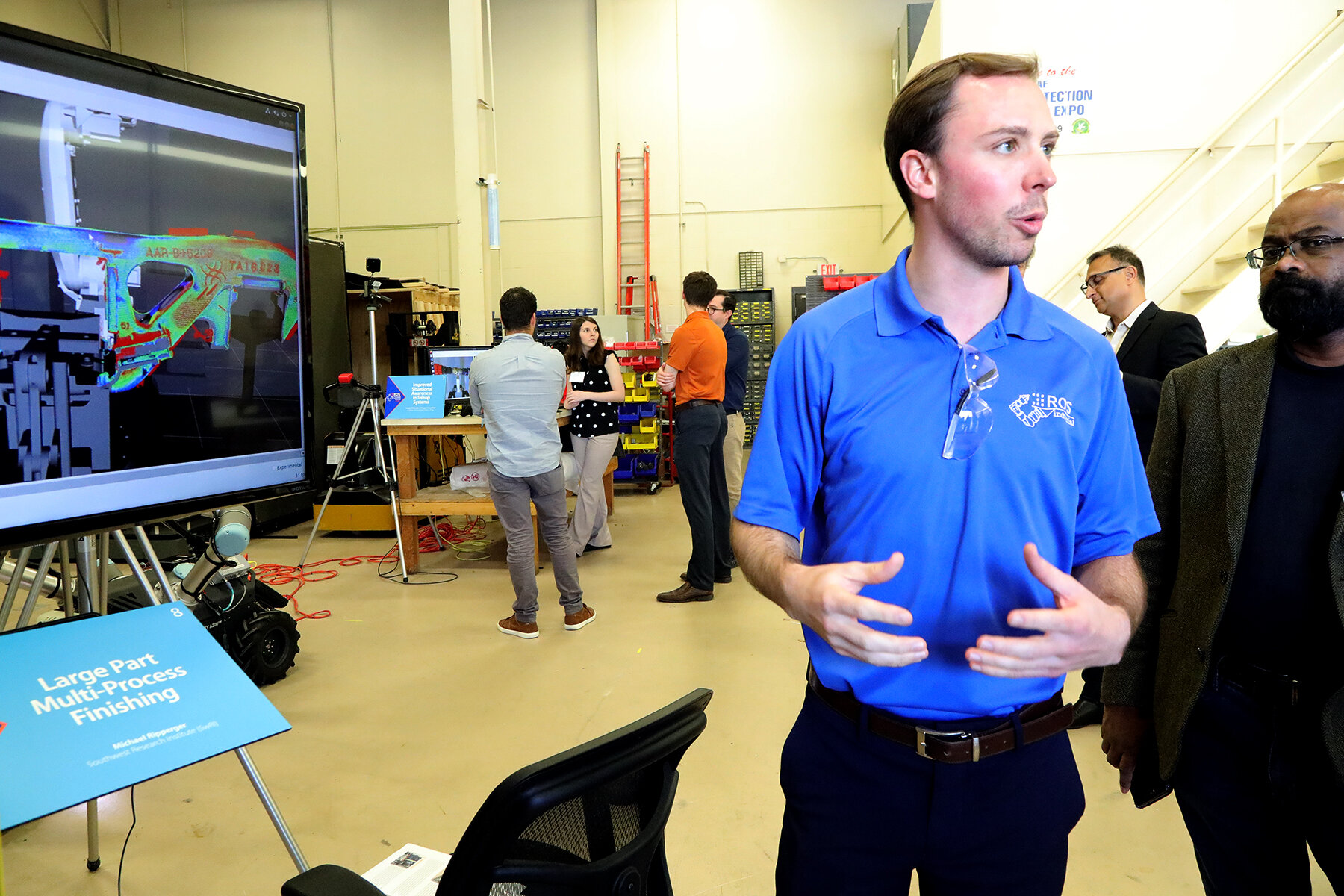
The afternoon featured tours and demonstrations within the SwRI organization and in collaboration with partners. SwRI demonstrations included a ROS2 Mobile Scan-N-Plan that featured localization, reconstruction, machine learning-based segmentation, tool trajectory planning, and optimization-based free space motion planning. Other demonstrations included SLED, and SwRI’s Ranger for autonomous vehicle localization, as well as work in single camera markerless motion capture by SwRI Human Performance Initiative, which has broad applicability in manufacturing robotics with regards to capability. Mathworks demonstrated some of the latest features related to ROS and Simulink, including safety, and UT Austin demonstrated improved means for ease of use in complex systems for inspection/handling tasks in hazardous environments.
The tour and demonstrations included off-campus visits to Xyrec and Plus One Robotics. Shaun Edwards and Paul Hvass offered tours and a behind-the-scenes perspective for how their business has grown and the need to provide their customers a means to try and test before deciding to implement. Xyrec visitors were treated to a firsthand overview the largest mobile robot produced, designed to apply laser ablation surface treatments to commercial aircraft.












Day one concluded over dinner and networking. It was an excellent opportunity to chat with key partners, stakeholders, and new faces about the landscape of advanced robotics, and how we are seeing more rapid progression from academia to factory floor.
Day 2 – Membership Highlights
Day two, the member-only portion, is a forum for membership to share what they are working on, challenges, and seek out areas and partners for collaboration. The day started off with Consortium updates by region, starting off with Americas, then progressed through the EU and Asia-Pacific. Each region has shown progress to delivering more content and training related to ROS2. The EU Consortium shared updates and outcomes of the ROSin initiative, and Asia-Pacific discussed the Singapore-led healthcare initiative Robotics Middleware Framework (RMF), which seeks to disrupt how healthcare adopts both IoT and robotics.
A panel discussed why end-users are looking to advanced robotics solutions via a ROS-based approach, and what are some of the motivations, and challenges that these approaches face today. David Leeson of Glidewell Labs, Greg Balandran of Spirit AeroSystems, and Mitch Pryor of UT Austin Nuclear Robotics Group shared anecdotes and practical examples where there are no solutions in the traditional industrial world. They also discussed challenges their organizations face and shared how an open-source model enables more efficient spread of emerging capability, hopefully preventing silo formation amongst a select few solution providers.
From here, Dave Coleman of PickNik shared recent developments around MoveIt2, including capabilities around real-time path planning. Open Robotics Developer Advocate Katherine Scott then shared developments and opportunities to collaborate around ROS2 and the curation of the ROS ecosystem.
The keynote for the member day of the annual meeting featured Greg Balandran, R&T Engineered Factory Automation Manager ad Spirit AeroSystems, who discussed ROS-I’s Influence on Automation Strategy. Greg shared challenges that his organization has faced and how leveraging ROS and working within ROS-I helped accelerate their automation development and roadmap execution.
The day two afternoon kicked off with a workshop where members broke into groups to discuss elements of the vision for ROS-I, needs, and the areas where membership can focus for advancement. The key takeaways from this workshop were:
- There is a huge desire for richer industrial-centric training and education resources, beyond the current instructor-led model. These could include cloud-based exercises of the current topics, as well as new topics such as navigation for industrial-centric applications.
- There was a great discussion around additional vehicles to drive investment into ROS-I and the capabilities to accelerate the capabilities of interest. This included collaboration with other organizations that fund mid-TRL research as well as other funding vehicles that foster small business engagement/participation.
- Numerous topics focused on moving ROS-I into a product or something tangible that an end-user can develop an application with tools they have existing familiarity with, such as CAD environments and the physics tools that they currently leverage.
- Detailed listing of capabilities that are desired to enable member applications that include real-time process planning, high-res SLAM, dynamic models, error handling and recover at the system level, and many others.
This feedback enables the Consortium to update and prioritize collaborations, training topics, project topics that are put forward and more to ensure the focus is appropriate relative to the needs of the membership and the broader ROS-Industrial community.
The remainder of the day focused on member presentations that shared recent developments and contributions. Lou Amadio of Microsoft kicked it off with a presentation on recent developments relative to ROS and Windows, Azure, and Visual Studio. Arnie Kravitz, CTO of the ARM Institute, discussed how ROS and ROS-I play a key role in the ARM Institute’s vision in fostering advanced robot capability from the research domain, to be ready for production.
YJ Lim, Sr. Technical Product Manager of MathWorks, shared what the latest developments by MathWorks have meant for developing functional safety in ROS-enabled systems. NOV’s Justin Kinney, Technical Manager Robotics and Mechatronics, shared the end-user ROS journey, from “What is a ROS” to their own functional full-scale demonstration on a test bed, a powerful story that lays out what is possible by leveraging the resources available in the community and working with the other members to further your vision.
Wrapping up the day, John Wen of Rensselaer Polytechnic Institute, and John Wason of Wason Technologies, shared their collaborative ARM Institute project, on Robot Raconteur, which is a middleware that enables easy integration of numerous types of hardware components, which now has interoperability with ROS, and how they are seeking to progress the work to enable richer industrial applications. Eugen Solowjow, Research Scientist at Siemens Corporate Technology, shared recent developments by Siemens that further the tighter connection between industry standard technology, that has the safety and reliability that is expected, but offers both interoperability with ROS-enabled components, as well as the latest AI on the edge capability that is currently emerging for advanced capabilities.
Moving Forward
It was a full two days, and though there remains uncertainty relative to how many in person or physical development we can do, the benefit of collaborative software development, and as evidenced in all the activity in the open source community, though physical testing and developments may have slowed, show there is a lot of work that can be done, even during a challenging time. We hope that those who attended, both in person or remote, also feel as motivated to see how we can further ROS-I into the project and product that we feel it can be. We look forward to stepping up to the challenges put forth by our membership and partners, and hope you also look forward to joining in that journey.