First ROS-Industrial Asia Pacific Workshop 2016
/Submitted by: Nicholas Yeo, Technical Director, Advanced Remanufacturing and Technology Center, Singapore
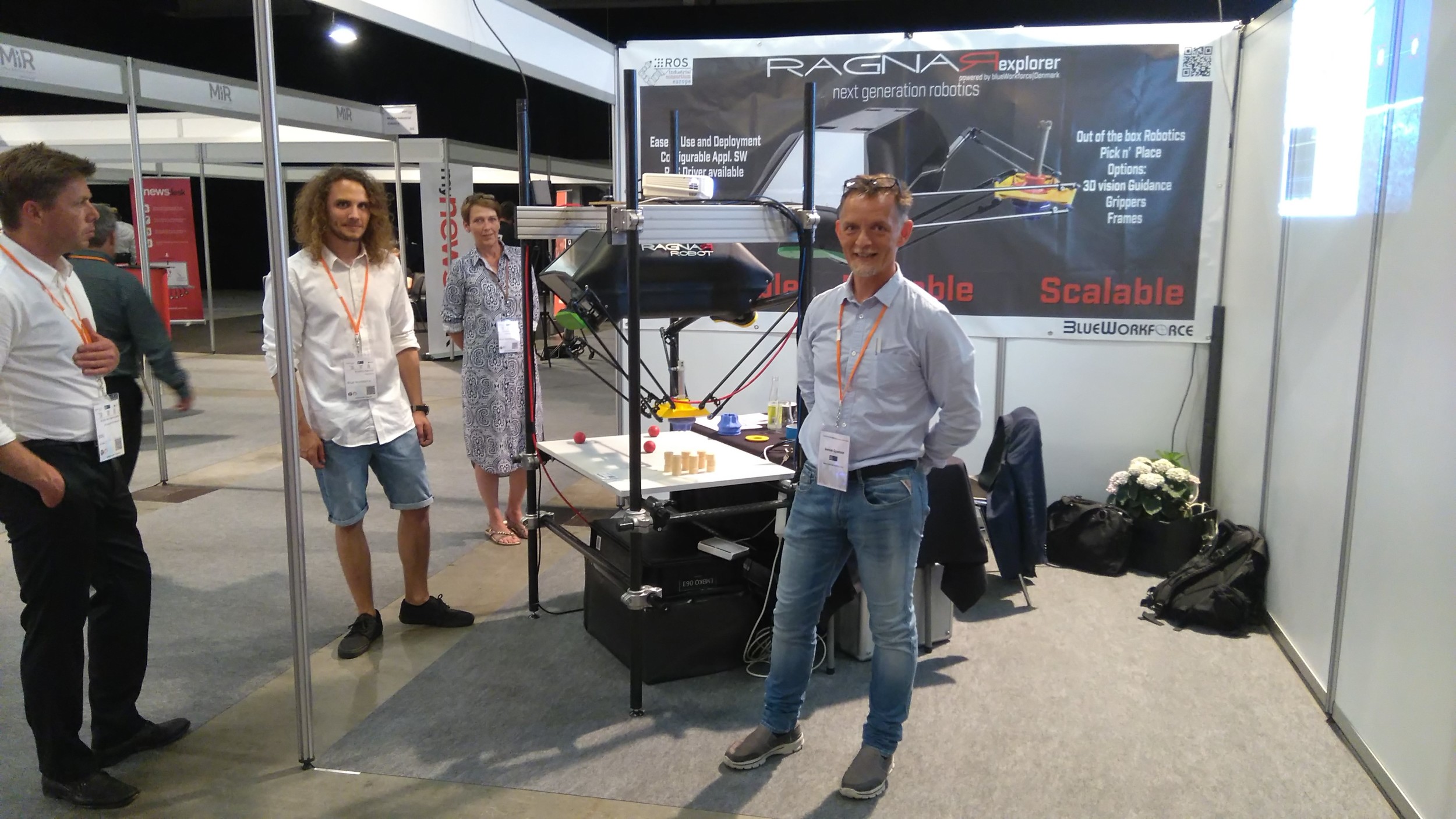
We just conducted our first ROS-Industrial Asia Pacific Workshop to a sell-out crowd. ROS enthusiasts from academia, research institutes, and industry participated in the event. We hosted a 2-day event on 14-15 Jul 2016 at the Advanced Remanufacturing and Technology Centre and Nanyang Technological University.
Along with exciting presentations and demonstrations of ROS-I, speakers from the local and international region discussed ROS-I and related topics.


With this, we are announcing the launch of a ROS-Industrial Consortium for the Asia Pacific region. ROS-Industrial Consortium Asia Pacific (RIC Asia Pacific) joins similar organization in Europe and the Americas to expand the outreach of ROS-I. We hope this will be one of the many events and opportunities that RIC Asia Pacific can bring to industrial communities in Asia to support future use of ROS-I in robotic applications.
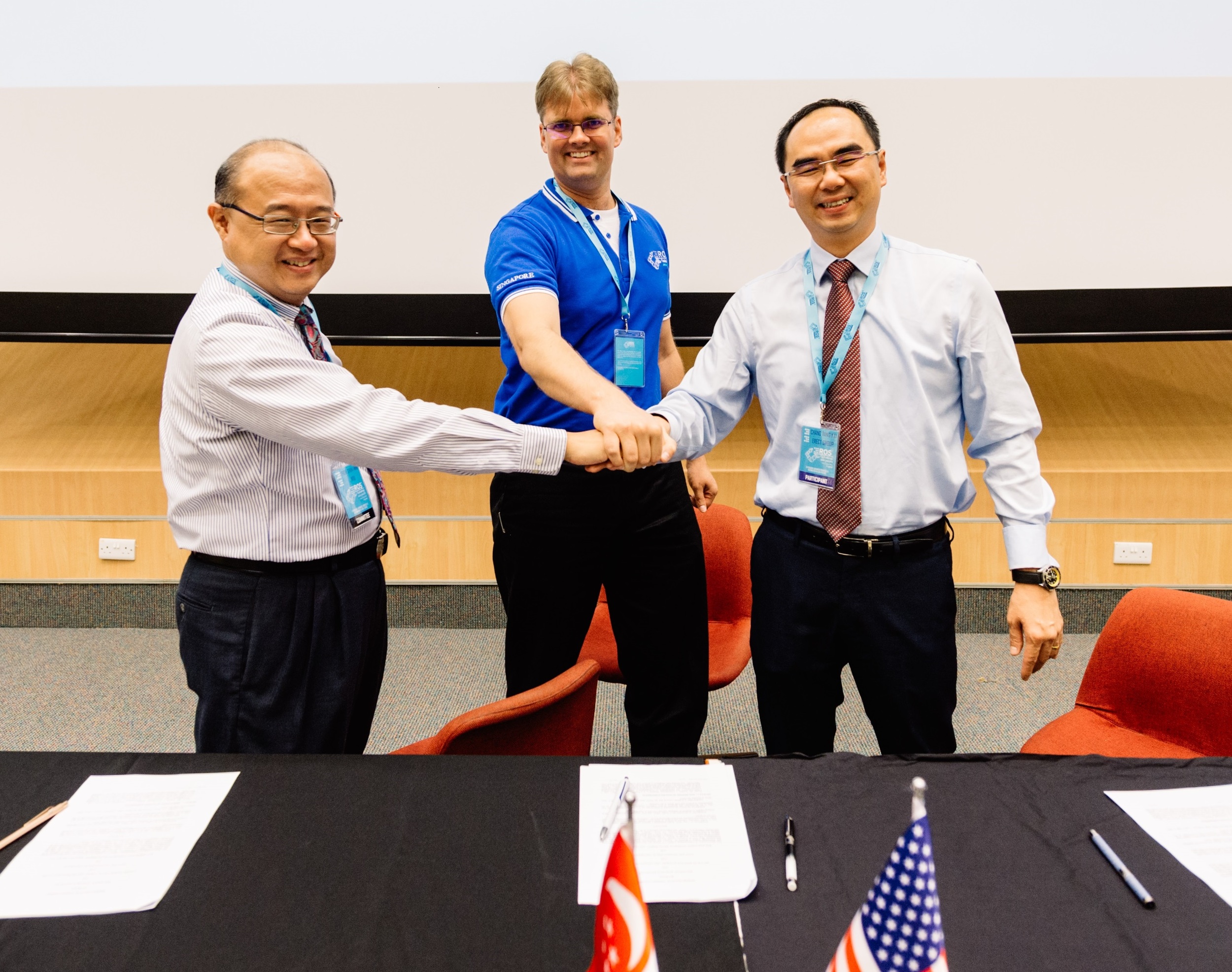
MOU Signing ceremony represented (from left): Prof Chen I-Ming (NTU-MAE), Paul Hvass (SWRI), Dr. DavidLow (CEO, ARTC)

ROS-I Consortium Managers (from left) -Mirko Bordignon (Fraunhofer IPA), Nicholas Yeo (ARTC), Paul Hvass (SwRI)