RIC-Americas Meeting Recap (Part 1 - March 3)
/Note: Part 2 of the RIC-Americas Recap will cover events that occurred on March 4.
The ROS-Industrial Consortium Americas annual meeting was held March 3-4 at SwRI's headquarters in San Antonio, TX. March 3 events included an introduction to SwRI, 16 lab demonstrations, a keynote presentation about the ways that ROS is adding intelligence to a five-story tall mobile robotic aircraft depainting system, and an introduction to the ROS-Industrial Consortium. More than 50 people attended representing a cross section of ROS-Industrial stakeholders including automation equipment OEMs, end users, researchers, and government. During the demonstrations, the noise of numerous discussions gave the event a palpable buzz. While still relatively young, we heard a number of attendees remark that ROS-Industrial has momentum.
Special thanks to our demonstration teams and presenters:
ROS/ROS-I Demonstrations:
- Autonomous Vehicle Test Rides. Chris Mentzer, Kris Kozak, Mark Alban, Ed Venator, SwRI.
- Large-scale Mobile Robotic Laser Depainting. Clay Flannigan and Michael Rigney, SwRI.
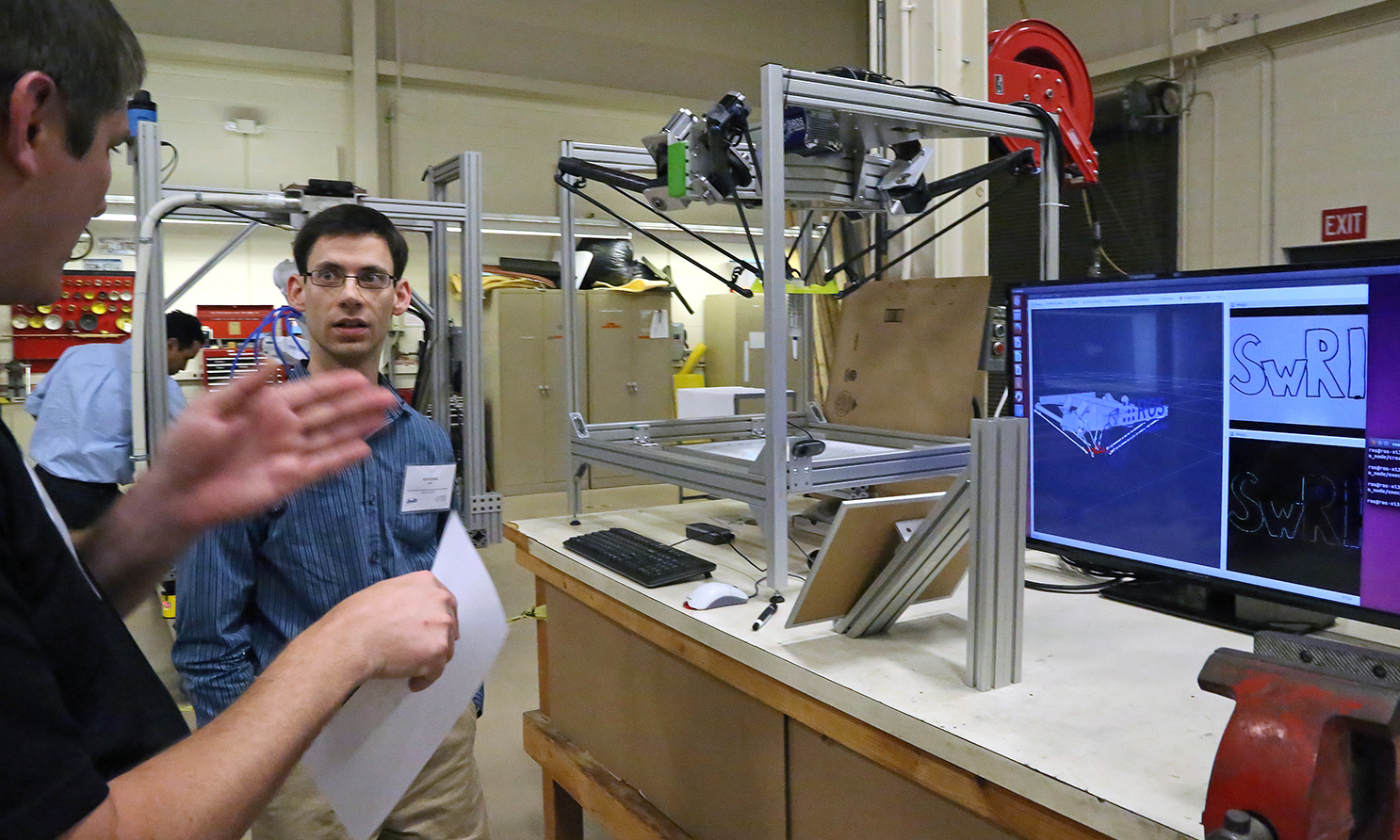
- Descartes Constrained Cartesian
Motion Planner. Christina Gomez, SwRI. - Dual Arm Mobile Manipulation. Andrew
Sharp, UT Austin NRG. - Euler Mobile Order Fulfillment. Jorge Nicho, SwRI.
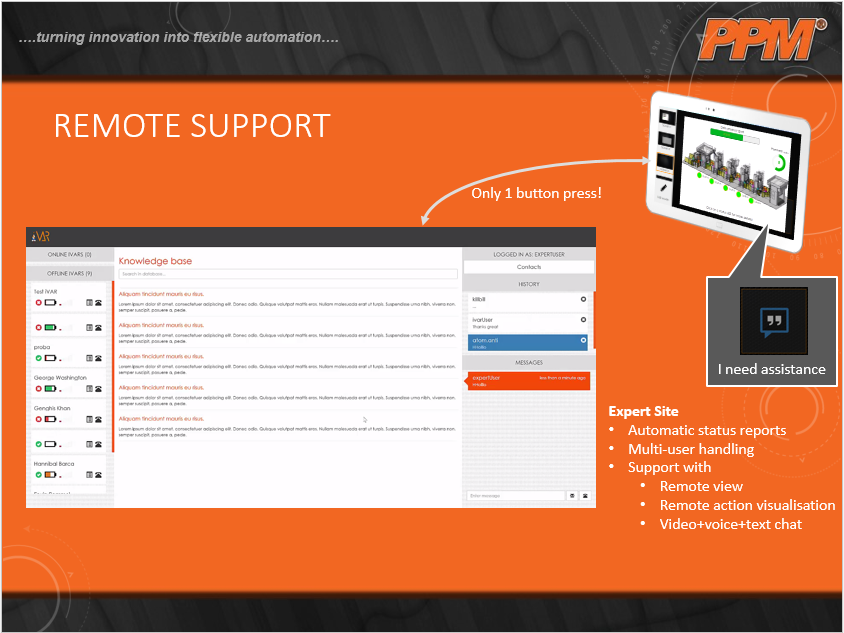
- FlexGUI. Trygve Thomessen, PPM AS.
- Heavy Equipment Simulator (not ROS,
but still cool). Susan Porter, SwRI. - Human-centered Teleoperation for
High-precision Tasks aka “Thread the
Needle”. Karl Kruusamäe, UT Austin
NRG. - Intrinsic Calibration. Chris Lewis, SwRI.
- Package Singulation. Shaun Edwards,
SwRI. - Ragnar 2D Vision/Replication. Alex
Goins, SwRI. - Ragnar Demonstration. Preben Hjornet,
Blue WorkForce. - Robotic Blending. Jonathan Meyer,
SwRI. - Scan-N-Plan for CAD-Free Painting.
Michael Blanton, SwRI. - STOMP Free-space Motion Planner. Levi
Armstrong, SwRI. - Thunder Motion Planner. Dave
Coleman, CU Boulder.
Presentations:
- Introduction to SwRI. Paul Evans, SwRI.
- Space Science. Philip Valek, SwRI.
- Large Robots Need Smart Controls. Jeremy Zoss, SwRI.
- Introduction to the ROS-Industrial Consortium. Paul Hvass, SwRI.

Scan-N-Plan for On-The-Fly Robotic Blending Demonstration workcell.

Explaining the Robotic Blending Process.

Blue Workforce Ragnar pick and place demonstration.
Ragnar 2D vision/Replication Demonstration.

Dual arm Mobile Manipulation.
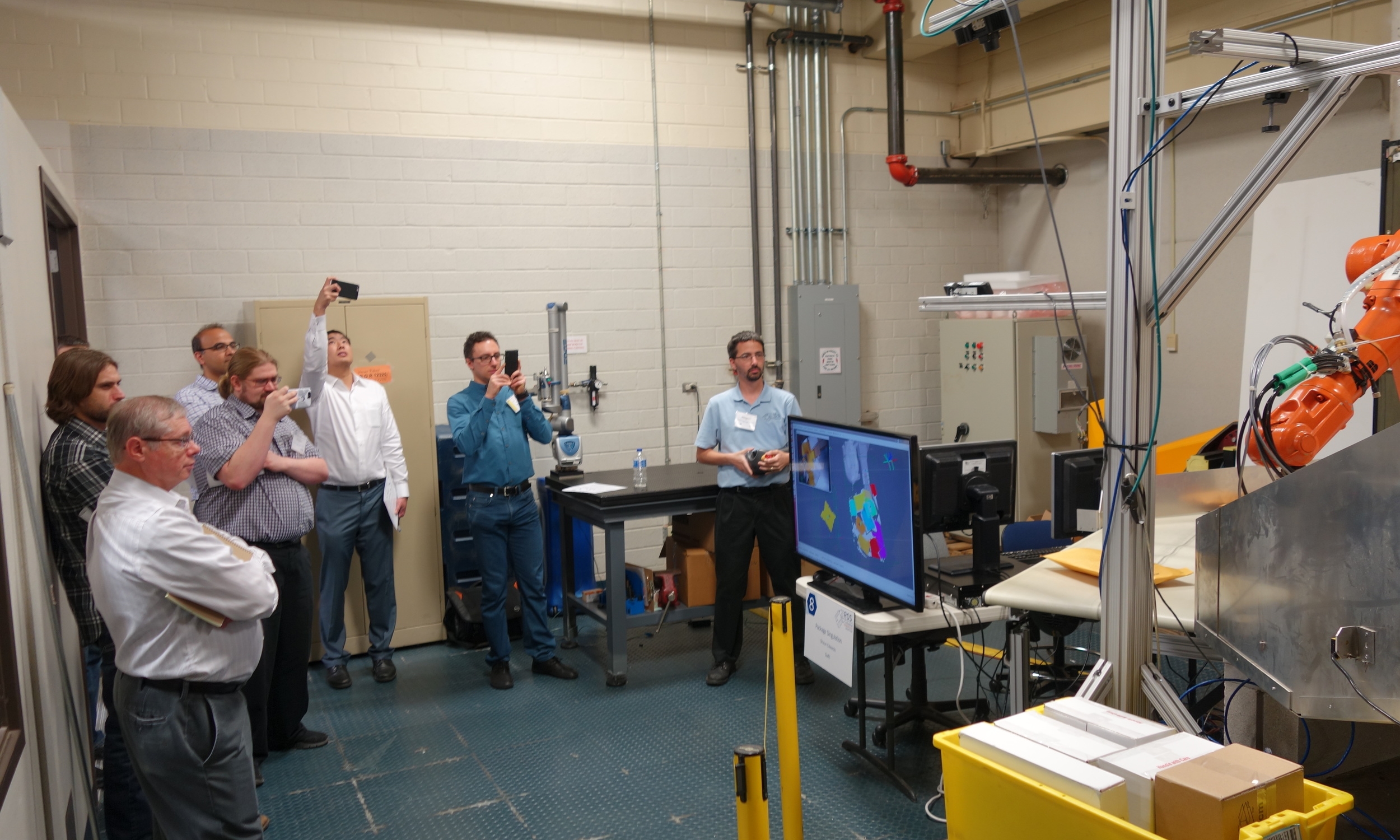
Package Singulation.

Intrinsic calibration.

Thunder Motion Planner.

FlexGUI Demonstration.

FLEXGUI runs from any web Browser, even a smart phone!

Discussion about the STOMP Motion Planner.

Close up of the sTOMP Planner.

Human-Centered Teleoperation for High Precision Tasks: Note the voice and gesture interface.

Another view of the Teleoperation Demo.
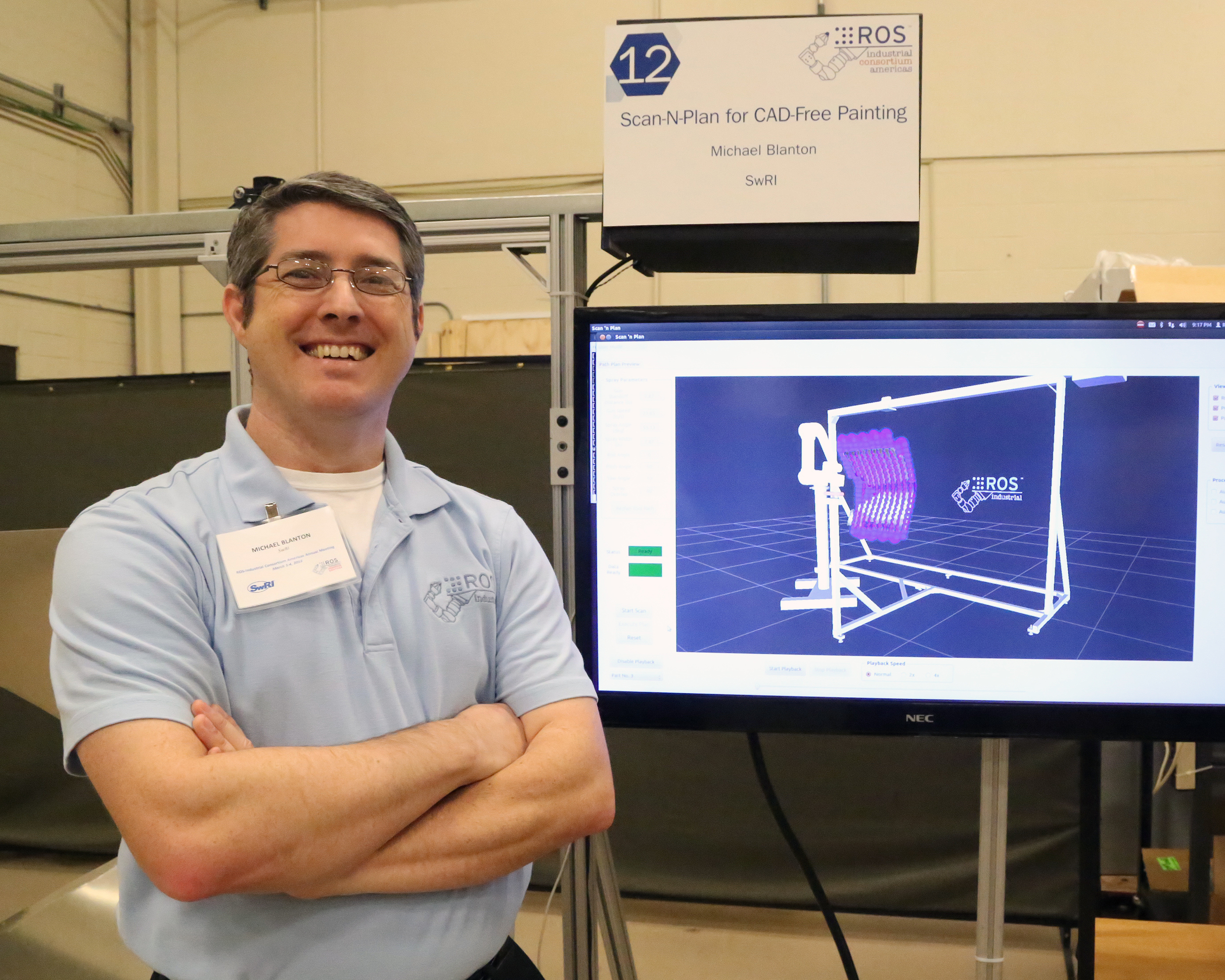
Scan-N-Plan for CAD-Free Painting.

Euler Mobile manipulator Demonstration.

Participants took turns riding in SwRI's ROS-enabled autonomous vehicles.

One vehicle navigated a slalom course while the other drove over a mix of paved and off-road Terrain.